RMP Motion Controller
10.6.8
APIs
, concepts, guides, and more
Community
Support
Contact
◆
Abort()
void Abort
(
)
Description:
Abort will disable and zero the filter output, and disable the Amp Enable output. The axis will be left in an error state (
RSIStateERROR
).
ClearFaults()
and
AmpEnableSet()
are mandatory before new motion commands can be executed.
Part of the
Action
method group.
Sample Code:
axis->Abort();
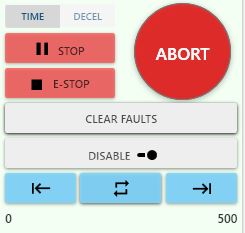
RapidSetup:
Go to axis screen->Position and Trajectory box. Various actions (Stop, EStop, Abort) are shown in image below.
See also
ClearFaults
,
Stop
,
EStop
,
AmpEnableSet
Examples
CalculateAccelerationFromVelocity.cpp
,
DifferenceOfPositionUserLimit.cpp
,
GcodeMotion.cs
,
HelperFunctions.cs
,
Homing.cs
,
MathBlock.cs
,
MotionHold.cs
,
MotionHoldReleasedBySoftwareAddress.cpp
,
MultiAxisMotion.cs
,
MultiaxisMotion.cpp
,
PVTmotionMultiAxis.cpp
,
PathMotion.cpp
,
PathMotion.cs
,
SingleAxisSyncOutputs.cpp
,
SyncOutputWithMotion.cpp
,
Template.cs
,
UpdateBufferPoints.cpp
, and
VelocitySetByAnalogInputValue.cs
.
RSI
RapidCode
RapidCodeMotion
Generated by
1.10.0