If the motion is in the moving state (RSIStateMOVING), a STOP action will decelerate the axis to a stop in the time specified by the "stop" time configuration - StopTimeSet(). The motion state will transition to RSIStateSTOPPING during the deceleration and then to RSIStateSTOPPED after the motion completes.
After Stop(), axis does NOT have error state & drive(amplifier) is still enabled
Warning
The stopping time that is used will be from the object (Axis or MultiAxis) that started the active motion, NOT the object that commanded this action.
If a MultiAxis motion is in progress, the stopping time will be determined by MultiAxis::StopTimeSet() and the individual Axis::StopTimeSet() values will be ignored.
Stop is the same as Pause, and can be resumed by calling Resume(). This means if you have commanded a move and call Stop() method, axis will retain it's motion profile which will continue upon calling Resume().
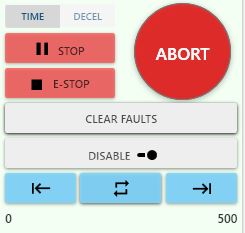
RapidSetup:
Go to axis screen->Position and Trajectory box. Various actions (Stop, EStop, Abort) are shown in image below.