If the motion is in the moving state (RSIStateMOVING), a STOP action will decelerate the axis to a stop in the time specified by the "stop" time configuration - StopTimeSet(). The motion state will transition to RSIStateSTOPPING during the deceleration and then to RSIStateSTOPPED after the motion completes.
After Stop(), axis does NOT have error state & drive(amplifier) is still enabled
Warning
The stopping time that is used will be from the object (Axis or MultiAxis) that started the active motion, NOT the object that commanded this action.
Stop is the same as Pause, and can be resumed by calling Resume(). This means if you have commanded a move and call Stop() method, axis will retain it's motion profile which will continue upon calling Resume().
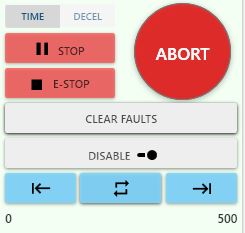
RapidSetup:
Go to axis screen->Position and Trajectory box. Various actions (Stop, EStop, Abort) are shown in image below.