|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
| void MoveSCurve | ( | double | position, |
| double | vel, | ||
| double | accel, | ||
| double | decel, | ||
| double | jerkPct ) |
Command a point-to-point S-Curve motion.
| position | Target Position in UserUnits. |
| vel | Maximum velocity, UserUnits/second. |
| accel | Average acceleration , UserUnits/second/second. (peak up to 2× accel when jerkPercent = 100, see below) |
| decel | Average deceleration , UserUnits/second/second. (peak up to 2× decel when jerkPercent = 100, see below) |
| jerkPct | Jerk Percent, which defines the percentage of acceleration time which is smoothed, 0.0 to 100.0 . |
Description:
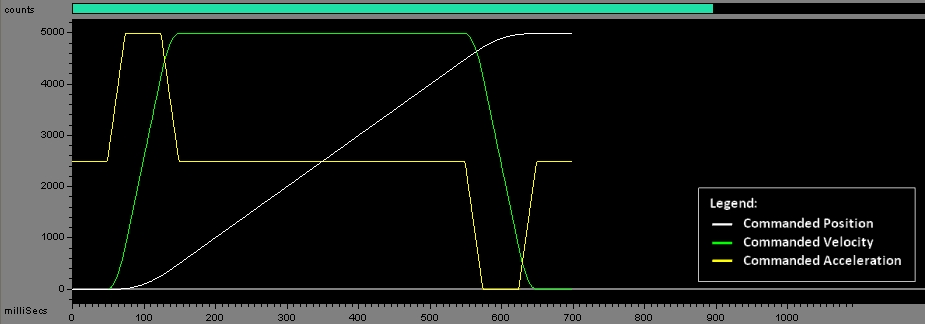
MoveSCurve command a point-to-point motion, with an S-Curve velocity profile. This type of motion has an "S" shape to the acceleration and deceleration phases. It uses the JerkPercent parameter to decide how much of the acceleration and deceleration phases is curved. A JerkPercent of zero produces a trapezoidal profile.
Using a non-zero JerkPercent increases the maximum acceleration above the user-specified average. If your system can’t handle the higher peak, you risk overshoot or excessive load. The relation between average acceleration and maximum acceleration is:
\[ Maximum Acceleration \;=\; \frac{accel}{1 - \bigl(jerkPercent \times 0.005\bigr)} \]
See the S-Curve Motion concept page for more information.
Using a non-zero JerkPercent increases the maximum deceleration above the user-specified average. If your system can’t handle the higher peak, you risk overshoot or excessive load. The relation between average deceleration and maximum deceleration is:
\[ Maximum Deceleration \;=\; \frac{decel}{1 - \bigl(jerkPercent \times 0.005\bigr)} \]
See the S-Curve Motion concept page for more information.
Part of the Motion method group. See the S-Curve Motion concept page for more information.