|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
Implement drive-based homing with DS402-compliant drives, utilizing built-in homing methods, ensuring accurate and network latency-free positioning, easily configured via our API or tools.
Drive-based homing uses preloaded methods available on your drive. This allows for homing to be performed entirely in the drive without network latencies producing more accurate results. Drive-based homing is the recommended homing strategy.
DS402 is a set of profile specifications that standardize the functional behavior of controllers for servo drives, frequency inverters, and stepper motors.
The following figure shows the relationship between the input objects and the output objects in the Homing Mode. You can specify the speeds, acceleration rate, and homing method. You can also use home offset to offset zero in the user coordinate system from the home position.
.png)
Using the NetworkNode.ServiceChannelWrite(index, subindex, byteSize, value) method from the Axis class, you can configure the following options:
| Parameter | Index | Subindex | byteSize | Value |
|---|---|---|---|---|
| Home Offset (optional, normally zero) | 0x607C | 0x0 | 4 | - |
| Home Method | 0x6098 | 0x0 | 1 | - |
| Home Speed (when searching switch) | 0x6099 | 0x1 | 4 | - |
| Home Speed (when searching zero) | 0x6099 | 0x2 | 4 | - |
| Home Acceleration | 0x609A | 0x0 | 4 | - |
| Change Mode of Operation to 6 (Homing Mode) | 0x6060 | 0x0 | 1 | 6 |
Ensure people and objects are clear of motion.
Start Homing by setting bit 4 of the Control Word to 1
(Control Word from 15 → 31)
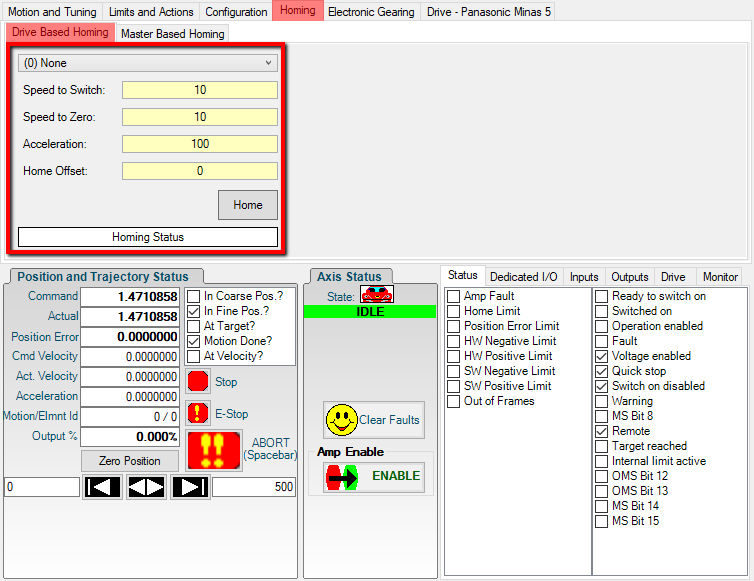
You can monitor the Status Word to determine if/when homing is complete:
Restore the mode of operation to the control mode you want to run in.
.png)
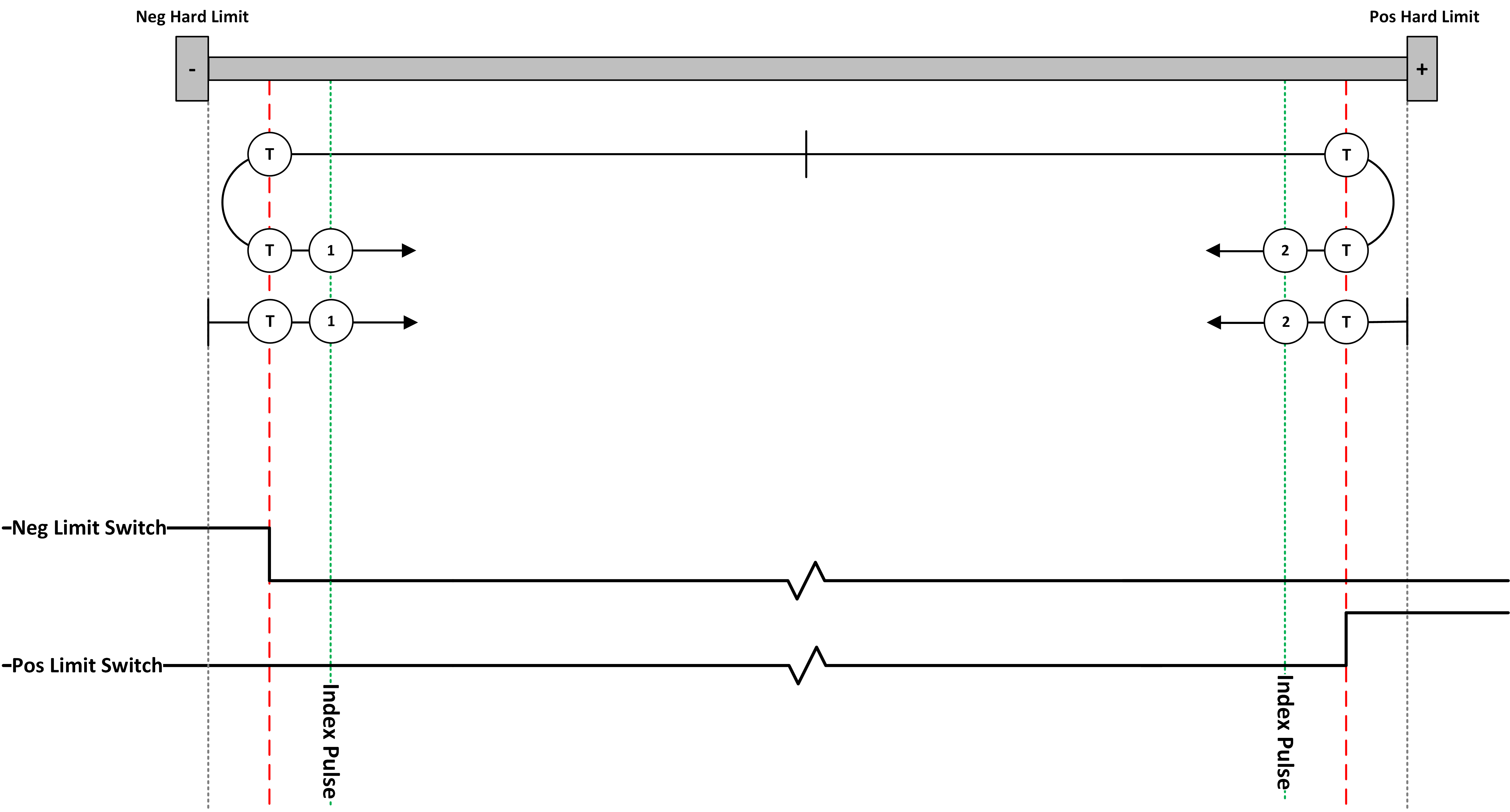
*Value**: 2 (Homing with the positive limit switch and index pulse)
(2) PositiveLimitSwitch LeftIndex
(3) PositiveHome LeftIndex (4) PositiveHome RightIndex
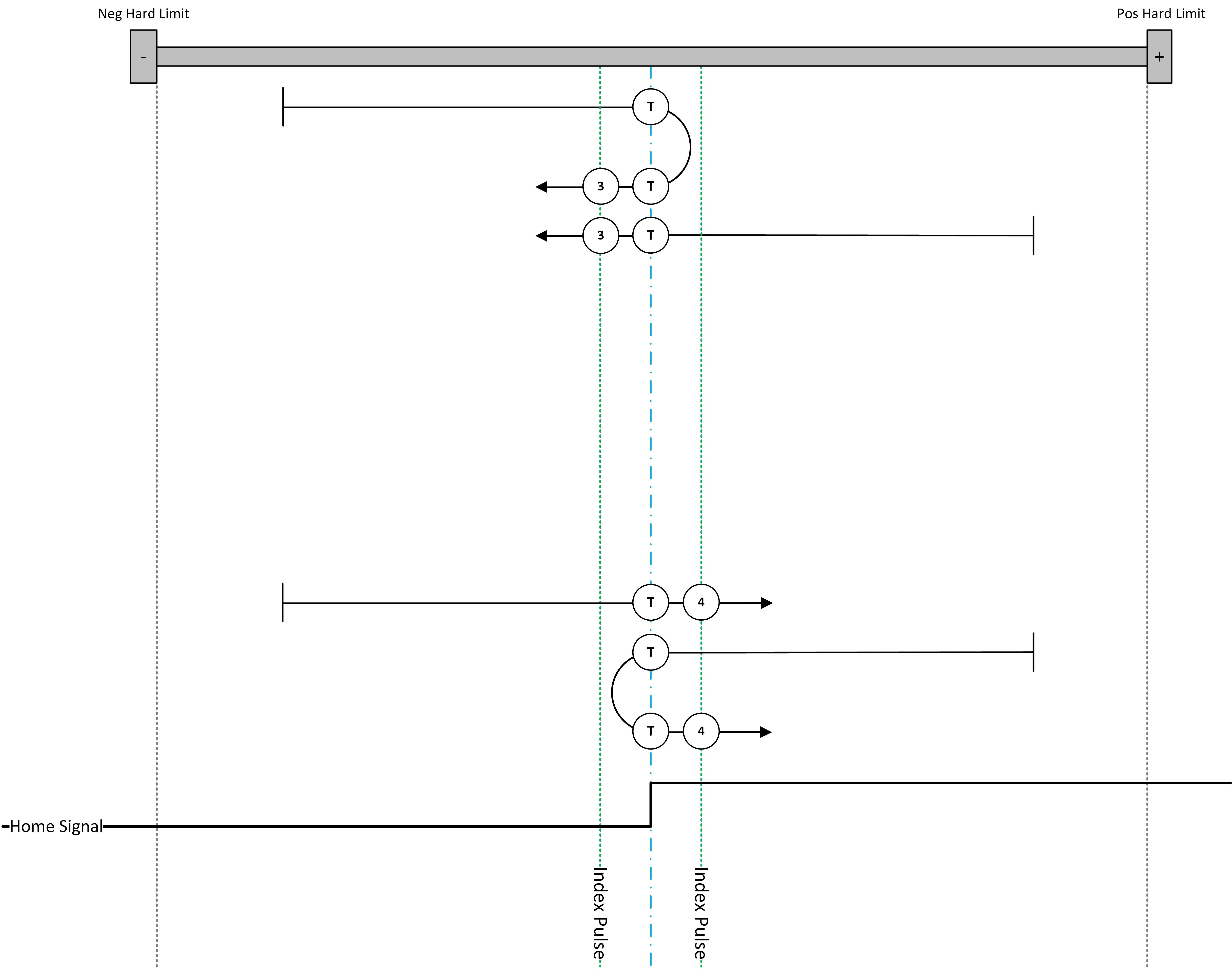
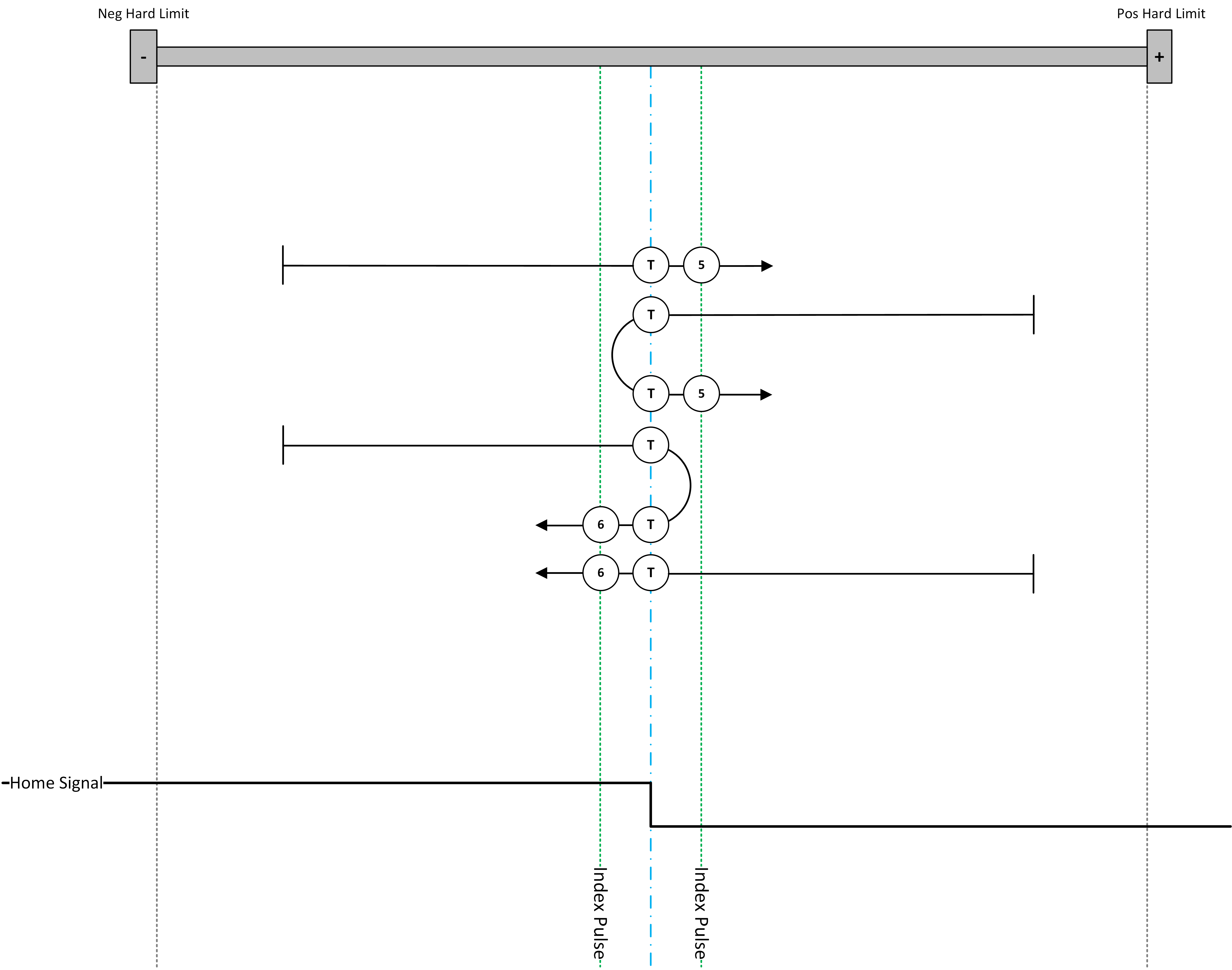
(5) NegativeHome RightIndex (6) NegativeHome LeftIndex
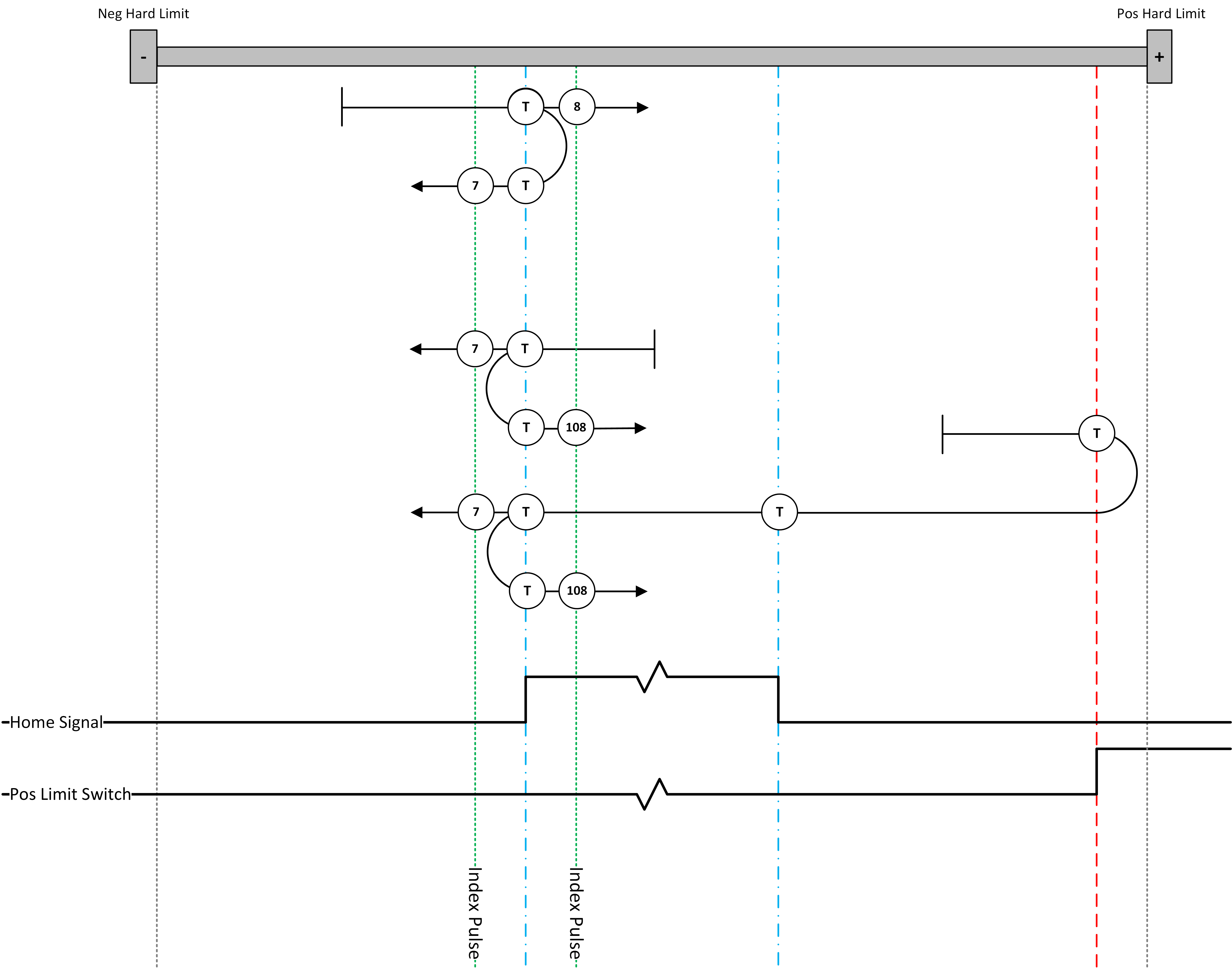
(7) RisingHome LeftIndex PositiveStart (8) RisingHome RightIndex PositiveStart
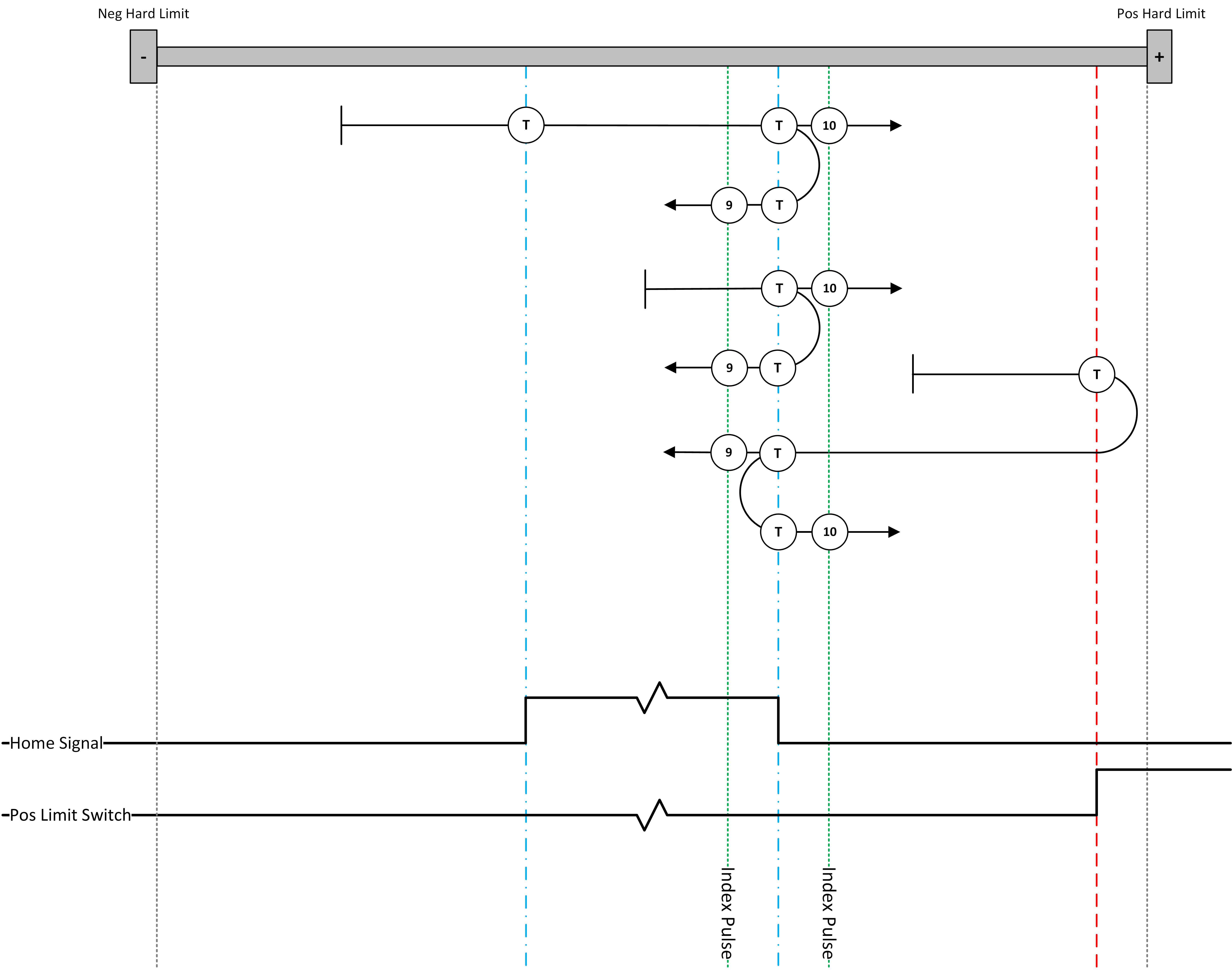
(9) FallingHome LeftIndex PositiveStart (10) FallingHome RightIndex PositiveStart
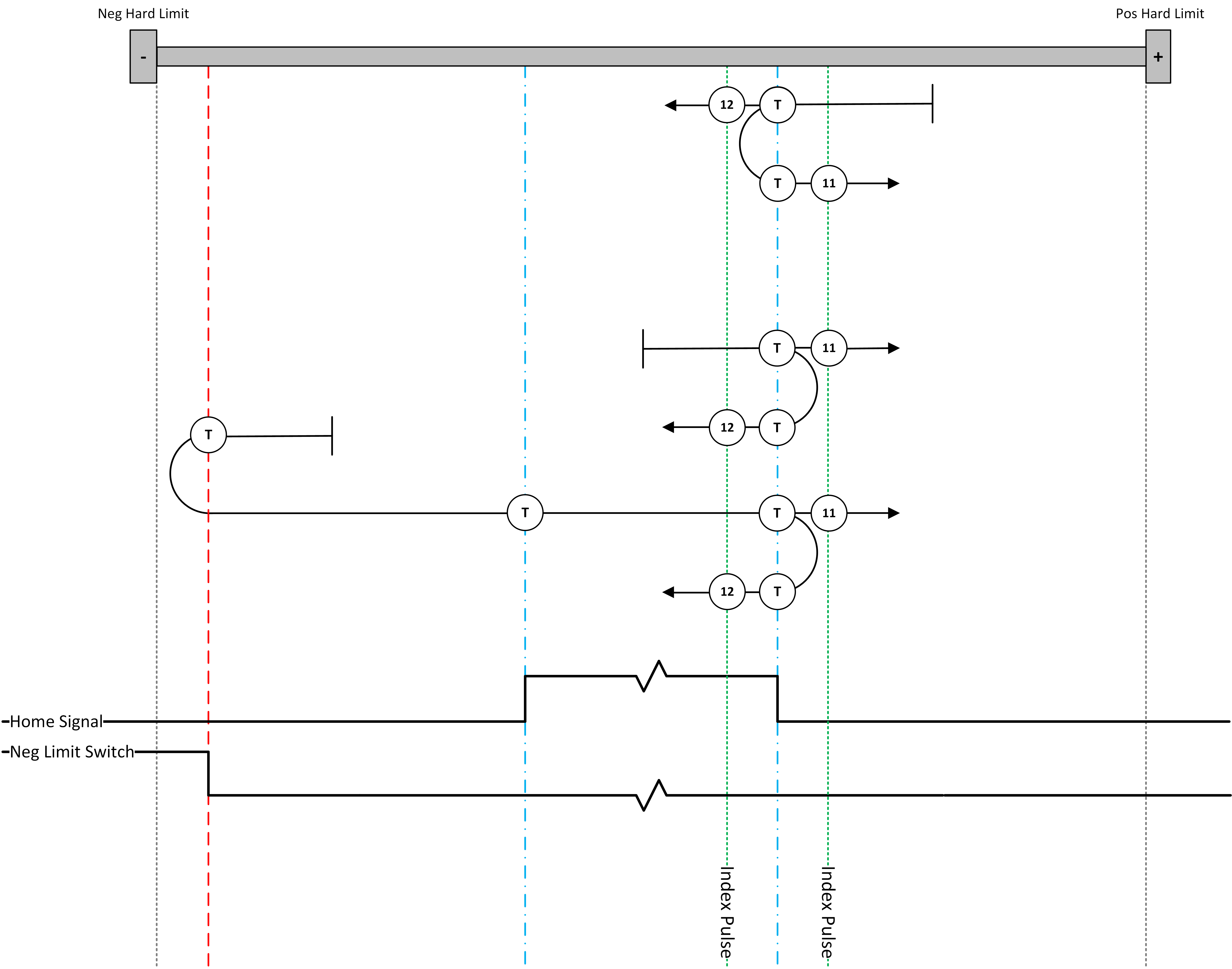
(11) FallingHome RightIndex NegativeStart (12) FallingHome LeftIndex NegativeStart
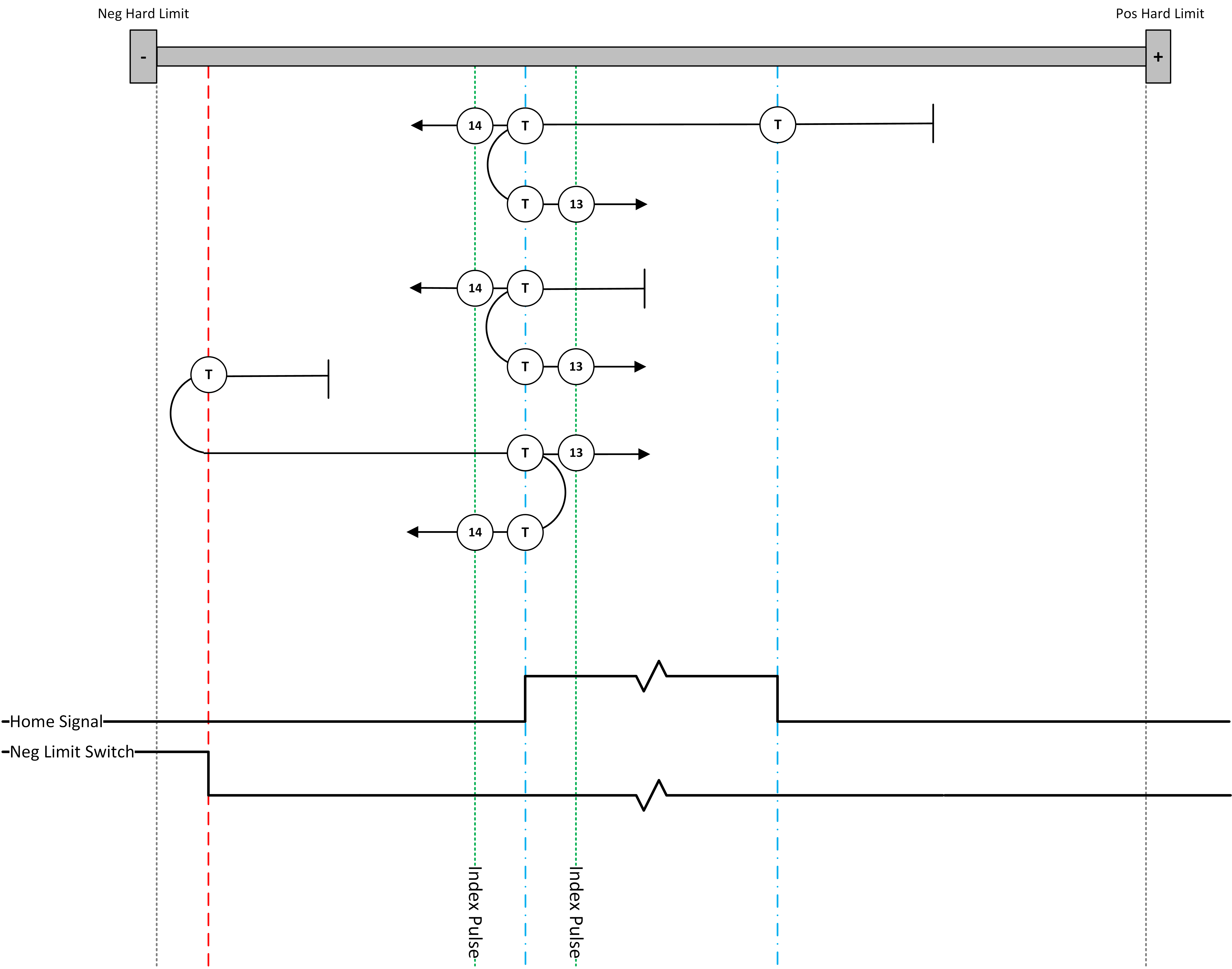
(13) RisingHome RightIndex NegativeStart (14) RisingHome LeftIndex NegativeStart
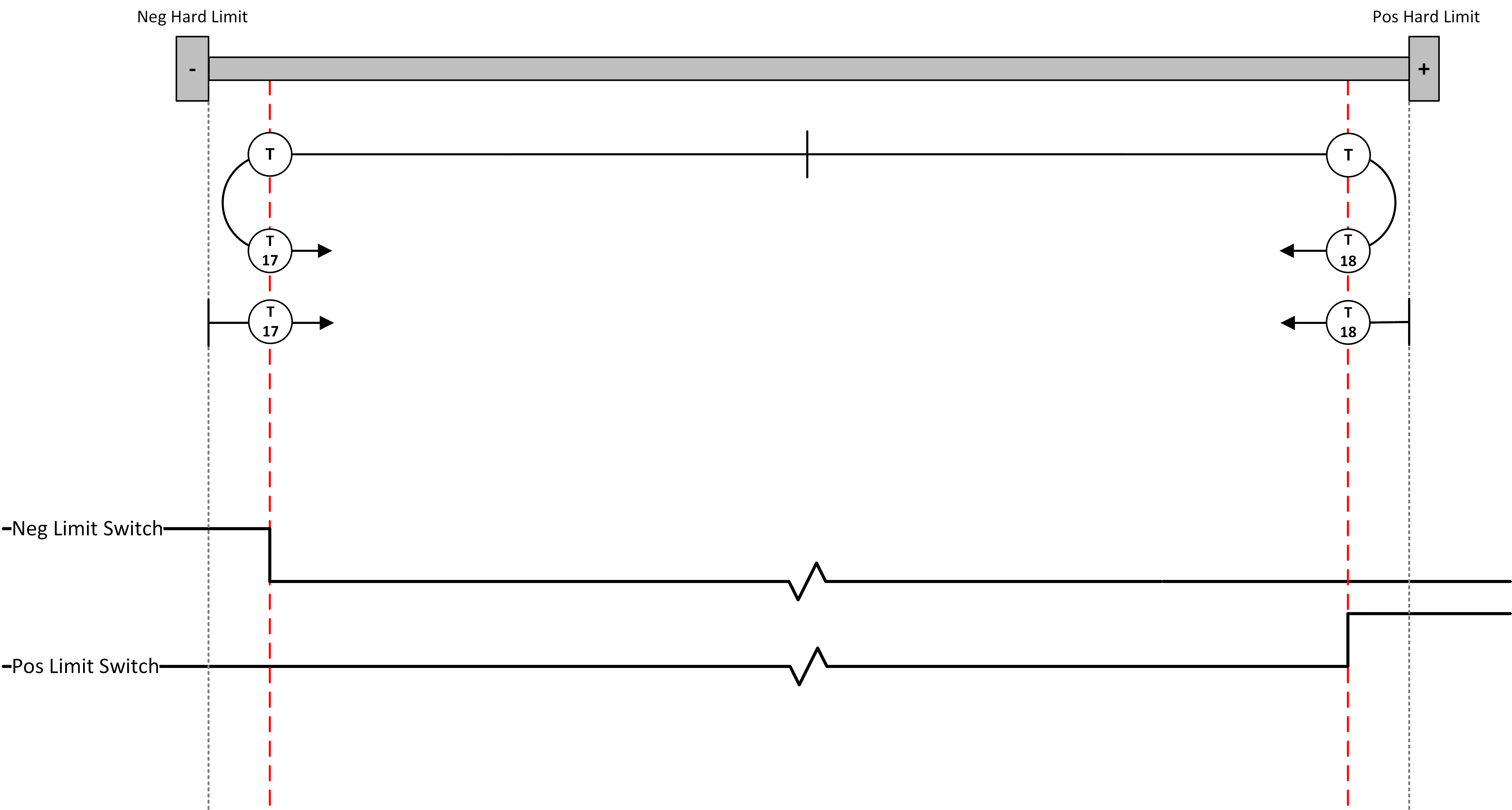
(17) NegativeLimitSwitch (18) PositiveLimitSwitch
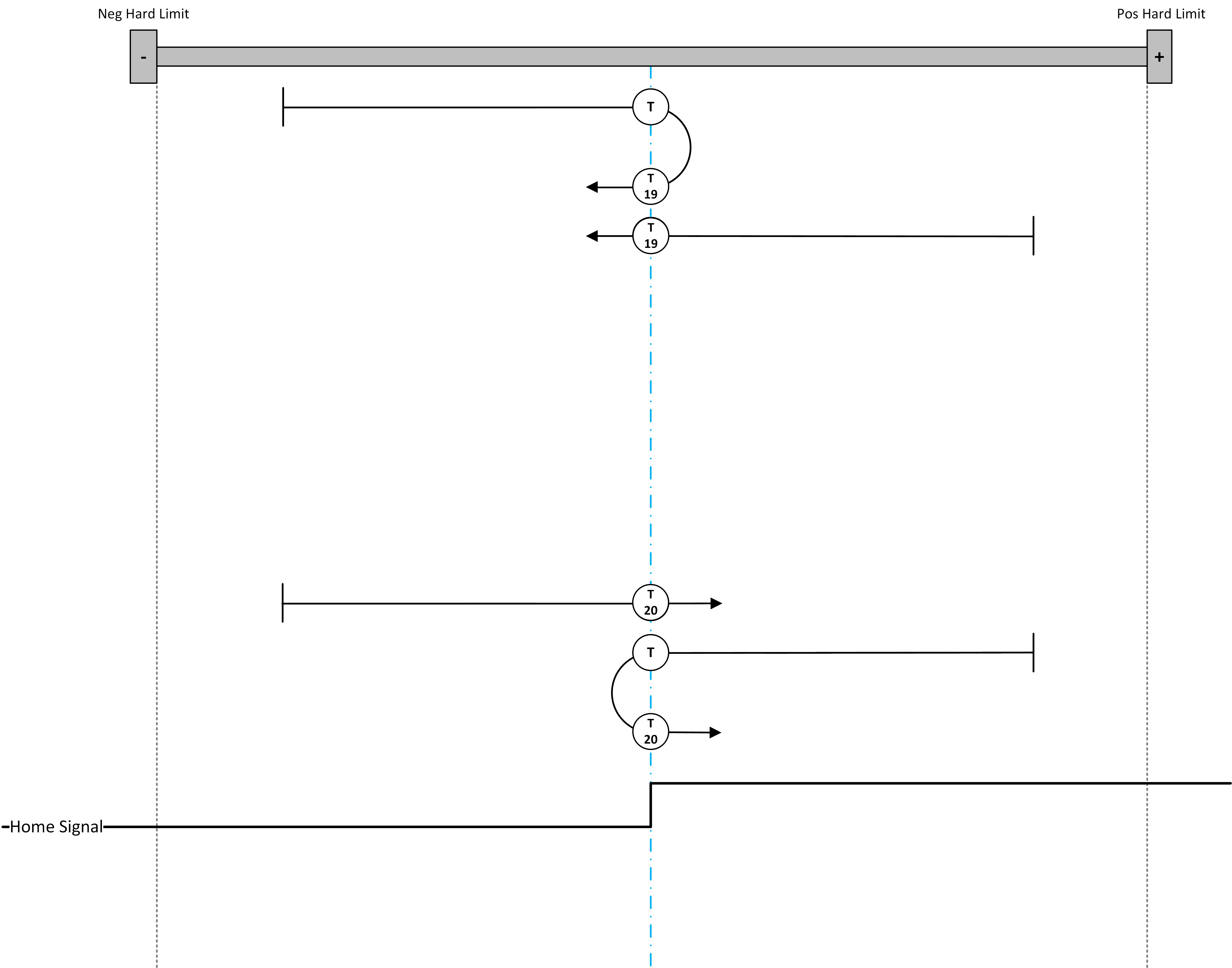
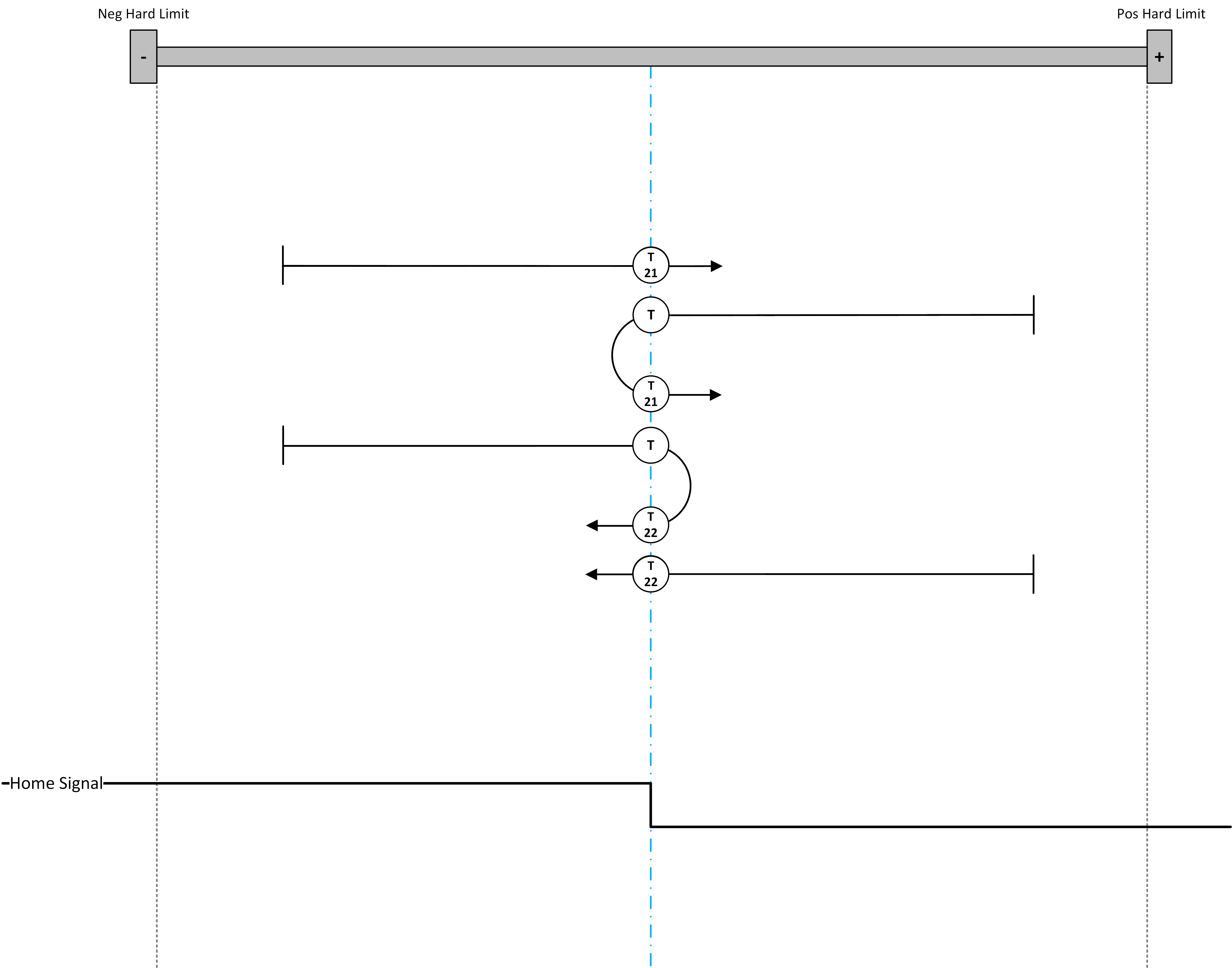
(19) PositiveHome NegativeMomentum (20) PositiveHome PositiveMomentum
(21) NegativeHome PositiveMomentum (22) NegativeHome NegativeMomentum
(23) RisingHome NegativeMomentum PositiveStart (24) RisingHome PositiveMomentum PositiveStart
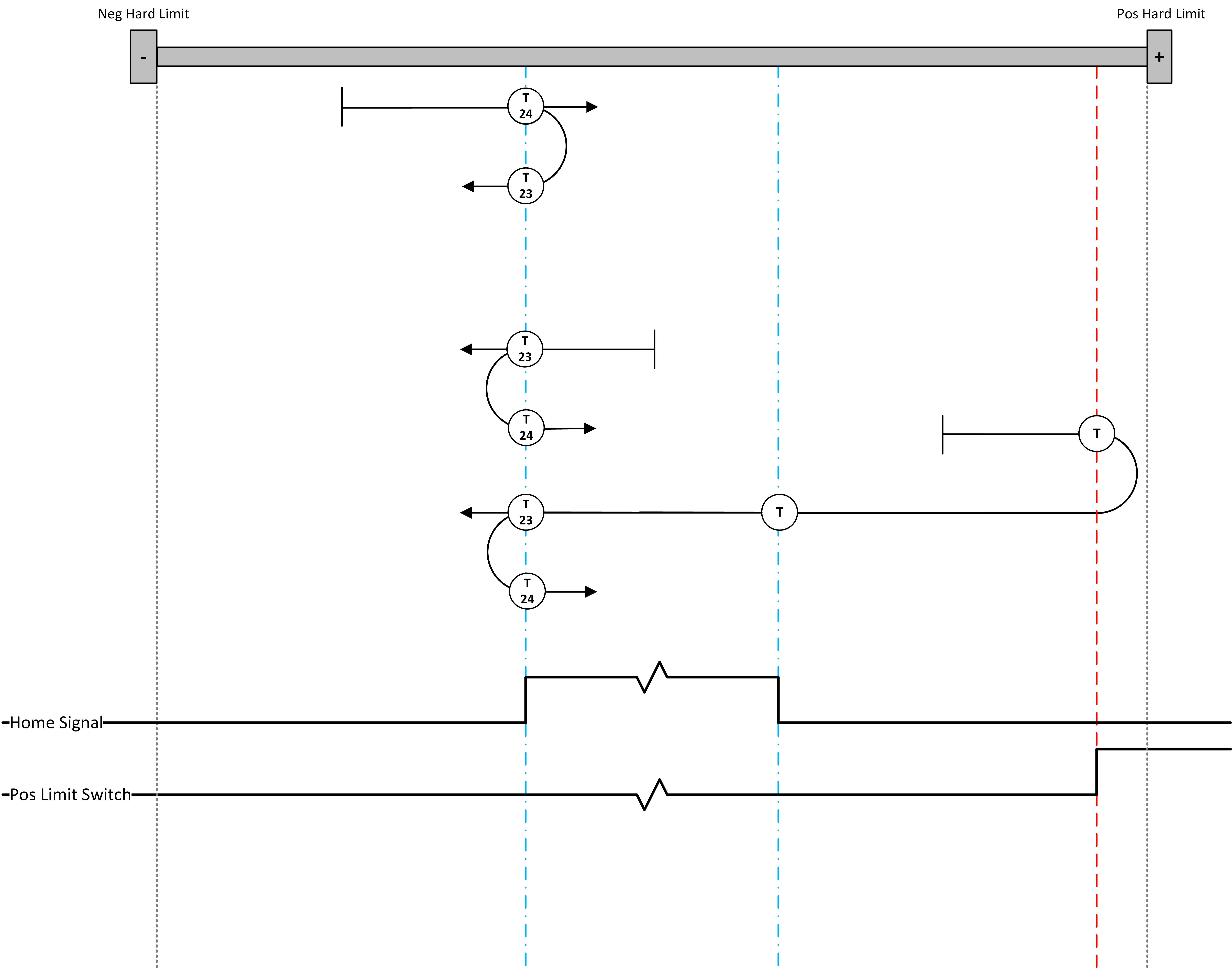
(25) FallingHome NegativeMomentum PositiveStart (26) FallingHome PositiveMomentum PositiveStart
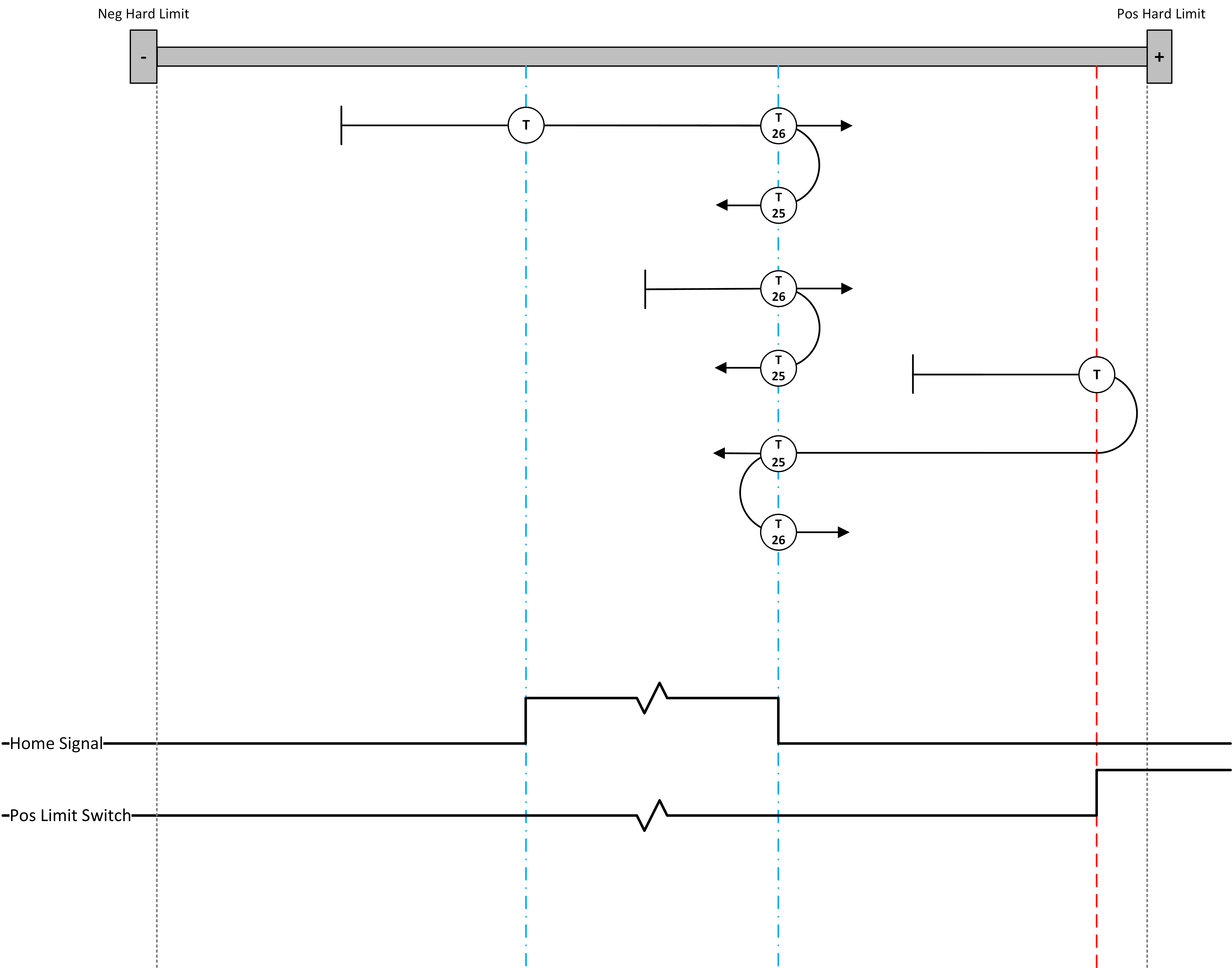
(27) FallingHome PositiveMomentum NegativeStart (28) FallingHome NegativeMomentum NegativeStart
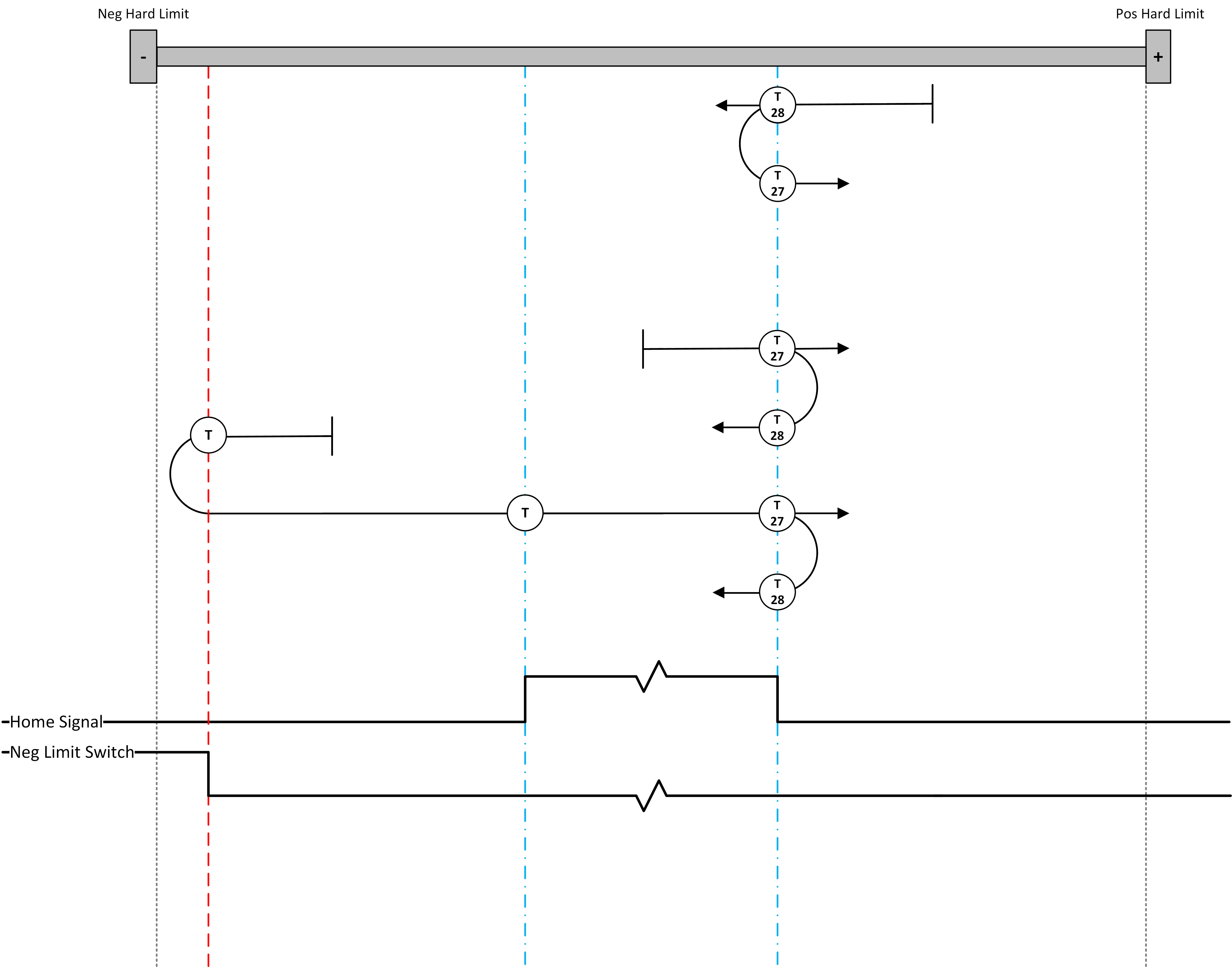
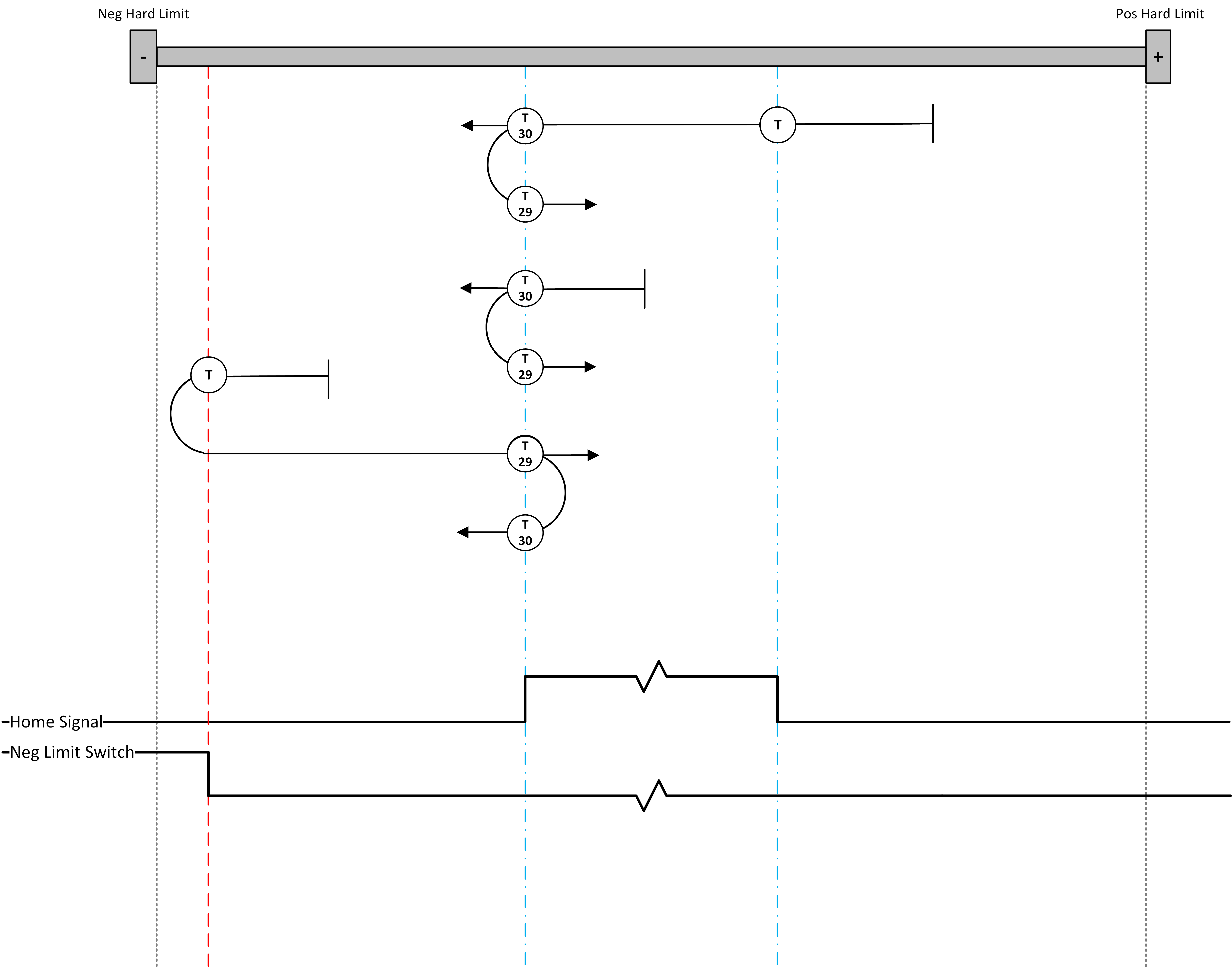
(29) RisingHome PositiveMomentum NegativeStart (30) RisingHome NegativeMomentum NegativeStart
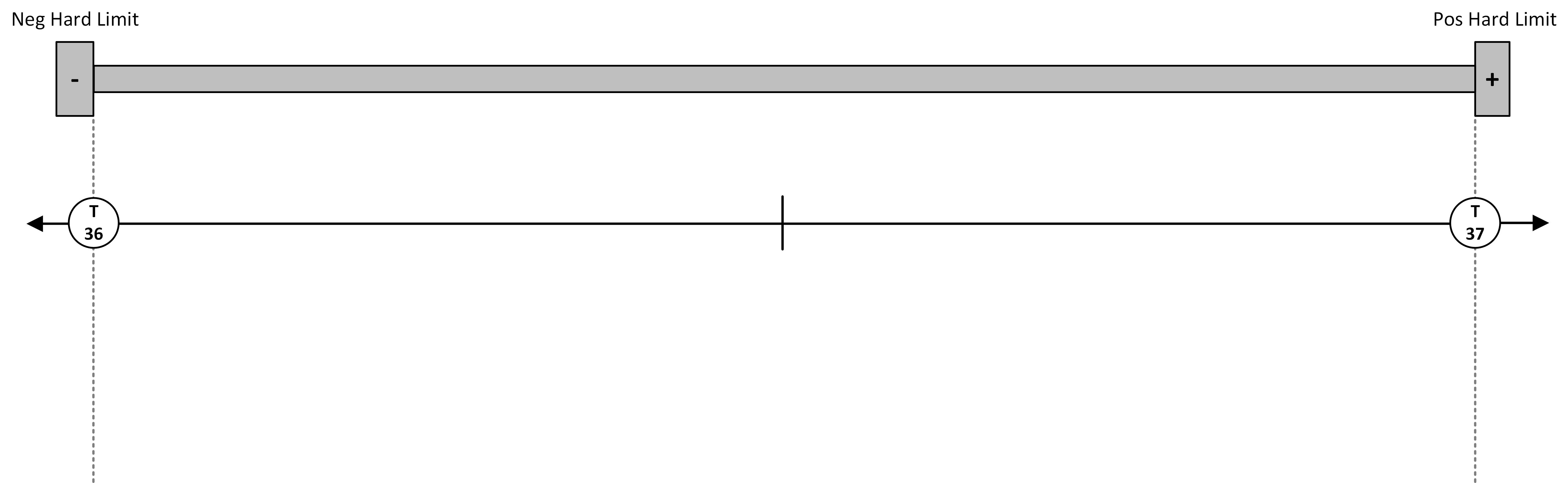
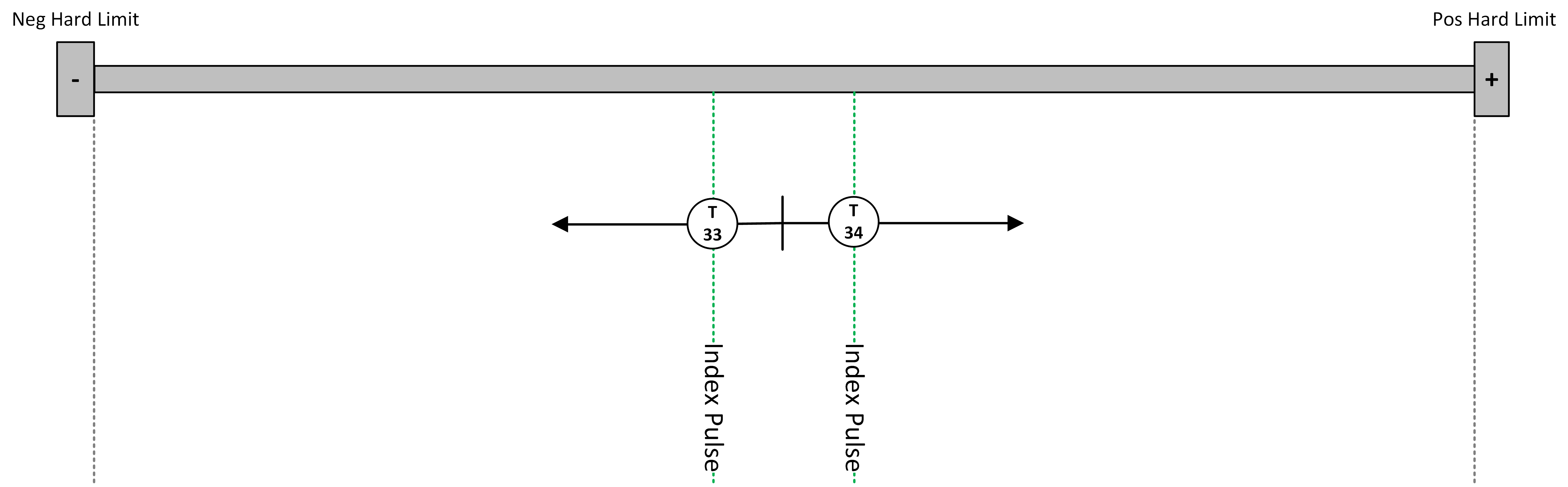
(33) Negative Index (34) Positive Index
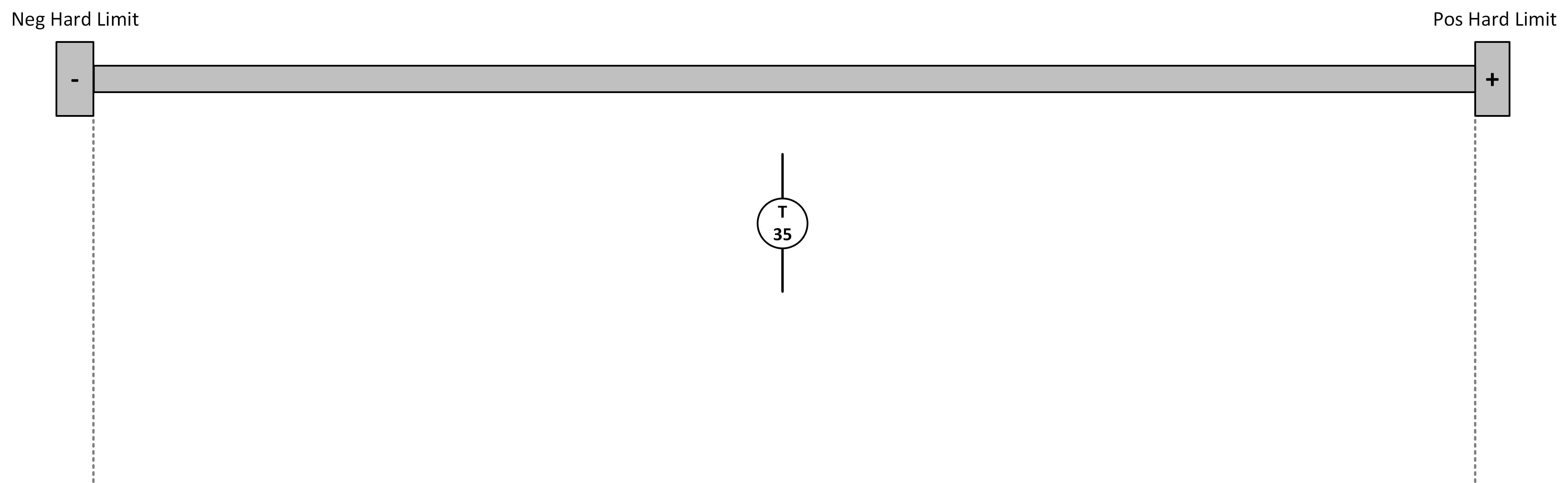
(35) Current Position
(36) Negative Hard Stop (37) Positive Hard Stop