This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
- Description:
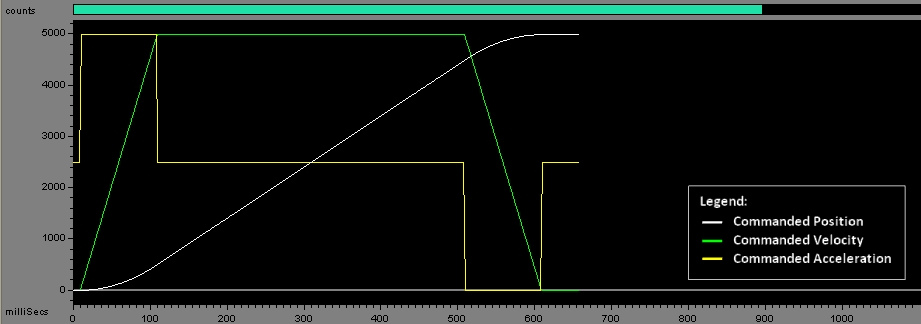
- MoveTrapezoidal commands a point-to-point motion with a trapezoidal velocity profile. This has a trapezoidal shape for the velocity with constant acceleration and deceleration phases.
- Parameters
-
| position | Target Position in units. |
| vel | Maximum velocity, units/second. |
| accel | Maximum acceleration , units/second/second. |
| decel | Maximum deceleration , units/second/second. |
- Note
- In most cases, a servo motor has a feedback device mounted. Depending on feedback device resolution, one motor shaft rotation will produce fixed value of counts. Example: motor has a resolution of 8192 counts. This means if 8192 is entered as distance to move, motor will move single revolution. User can implement UserUnitsSet() to change to a different unit (ex: mm, inches, etc) from encoder counts.
- Note
- Non-Blocking Execution Motion commands return instantly and do not pause code execution. Use MotionDoneWait() post-call to block execution until motion completes, or MotionDoneGet() to poll for completion.
Part of the Motion method group.
- Sample Code:
- AbsoluteMotion
- RapidSetup:
- Go to Axis->Motion (default tab)
- Motion Scope:
- Trapezoidal Move profile shown below:
- See also
- Point to Point, MoveSCurve, MoveRelative, MoveVelocity, MovePT, MovePVT
- Examples
- axis-motion-point-to-point.cs, and point-to-point.cpp.