|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
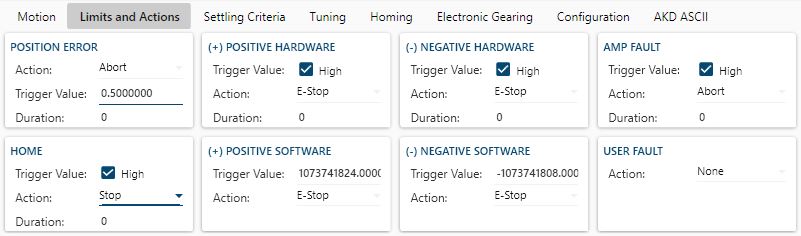
| void ErrorLimitTriggerValueSet | ( | double | triggerValue | ) |
| triggerValue | Position Error Limit in units. |
Part of the Limits and Action Configuration method group.