Optimize homing accuracy using drive-based ASCII commands on Kollmorgen AKD drives, reducing network latencies and allowing extensive customization through various homing methods and configurations.
🔹 What is Kollmorgen AKD Drive Based ASCII Homing?
AKD Drive-based ASCII homing uses preloaded methods available on the drive. This allows for homing to be performed entirely in the drive without network latencies producing more accurate results. Drive homing is the recommended homing strategy.
- Note
- We have created a separate version for Kollmorgen AKD servo drive because even though the drive is part of the DS402 standard, its ASCII commands are more powerful and much easier to use. Instead of writing to SDOs, we will send ASCII commands to the AKD drive.
🔹 Kollmorgen AKD Drive Based Homing Using ASCII
1. Drive Configuration
DRV.OPMODE 2 - Set the drive to Position Operation Mode.
HOME.AUTOMOVE 0 - Make sure that automove is disabled. Unless you would like to trigger homing when amp/axis gets enabled.
Now, since we are running CANopen DS402 or EtherCAT, it is required that we set object/index 0x6060 through CAN/EtherCAT communication.
Index 0x6060 represents Mode of Operation. When homing we must specify the homing mode, and when homing is done we must go back to default mode.
We change the mode by writing to the SDO.
modeOfOpIndex = 0x6060;
modeOfOpSubindex = 0x0;
modeOfOpByteSize = 1;
modeOfOpValueToHOME = 6;
Axis.NetworkNode.ServiceChannelWrite(modeOfOpIndex, modeOfOpSubindex, modeOfOpByteSize, modeOfOpValueToHOME);
2. Dedicated Limit Switch Configuration (optional - dependent upon specific homing method)
*** If you are not using limit switches skip this section.
In this example we are using: Homing Method 1: Find Limit Input.
.png)
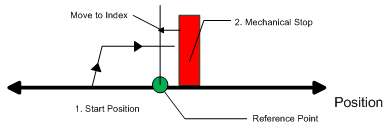
The ‘Find Limit Input’ method creates a move to a limit input. This method can be used if you have a positive or negative limit switch available that you want to establish as a home reference point.
- Note
- Limit switches should be set to Active Low (this means the state of the limit switch will be HIGH when not triggered).
AKD Digital Input Parameters:
DIN5.MODE 18
DIN5.INV 1
DIN6.MODE 19
DIN6.INV 1
Check the Kollmorgen AKD User Guide to learn about the different Homing methods.
2b. RMP to AKD position unit conversions
RMP position units from the AKD will be in counts. For rotary motors, the counts per revolution will be defined by the AKD parameter FB1.PSCALE (primary feedback position scale). The default value is 20, which yields 2^20 counts/revolution.
AKD Homing parameters will be in AKD drive units and are different for rotary and linear motors. Units depend on UNIT.VROTARY or UNIT.VLINEAR which can be:
Rotary: rpm, rps, deg/s, Custom Units/s, rad/s
Linear: counts/s, mm/s, µm/s, Custom Units/s
Similarly, check or confirm UNIT.ACCROTARY and UNIT.ACCLINEAR are set as expected.
3. Homing Parameter Configuration
AKD Home Parameters:
HOME.MODE
HOME.V
HOME.ACC
HOME.DEC
HOME.DIR
HOME.P
HOME.DIST
HOME.MAXDIST
HOME.IPEAK
Check the Kollmorgen AKD User Guide Check the Kollmorgen AKD User Guide for all other Home parameters.
4. Ready Axis
Axis.Abort();
Axis.ClearFaults();
Axis.AmpEnableSet(true);
- Warning
- Ensure people and objects are clear of motion.
5. Start Homing
6. Check Homing Status
You can monitor the Status Word to determine if/when homing is complete:
Status Word - bit 12 = 1(HIGH), if Homing was attained.
Status Word - bit 13 = 1(HIGH), if there was a Homing error.
If the drive homed properly, it will have set the RMP Actual Position to zero.
7. Clean Up
Axis.Abort() - Disable the Axis. This will disable the Axis and it will automatically set Command Position equal to the Actual Position. This is a required step before changing the control mode and enabling the Axis.
Restore the mode of operation to the control mode you want to run in. (Only do this when Axis is DISABLED.)
modeOfOpIndex = 0x6060
modeOfOpSubindex = 0x0
modeOfOpByteSize = 1
modeOfOpValueToDEFAULT = 7
Axis.NetworkNode.ServiceChannelWrite(modeOfOpIndex, modeOfOpSubindex, modeOfOpByteSize, modeOfOpValueToDEFAULT);
🔹 AKD Homing Methods
- Note
- Please refer to the link below for details on each homing mode to help you select appropriate mode for specific axis.
Detailed homing mode link
-
When using any of the methods that use homing switches and limits, please refer to the Input/Output section for proper wiring techniques.
Link to AKD online help
HOME.MODE 0: Home Using Current Position.
.png)
HOME.MODE 1: Find limit input.
.png)
HOME.MODE 2: Find input limit then find zero angle.
.png)
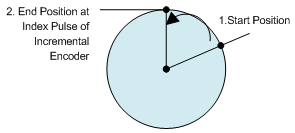
HOME.MODE 3: Find input limit then find index.
.png)
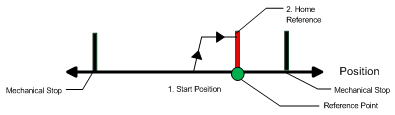
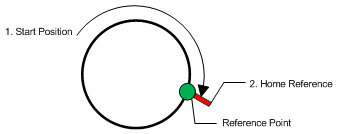
HOME.MODE 4: Find home input.
.png)
HOME.MODE 5: Find home input then find zero angle.
.png)
HOME.MODE 6: Find home input then find index.
.png)
HOME.MODE 7: Find zero angle.
.png)
HOME.MODE 8: Move until position error exceeded.
.png)
HOME.MODE 9: Move until position error exceeded, then find zero angle.
.png)
HOME.MODE 10: Move until position error exceeded, then find index.
HOME.MODE 11: Find index signal.
HOME.MODE 12: Home to home-switch, including mechanical stop detection.
HOME.MODE 13: Home to feedback position.
.png)
HOME.MODE 12: Home to home-switch for rotary applications.
HOME.MODE 15: Find next feedback zero position.
.png)
HOME.MODE 16: Find home input with dual edges.
.png)
HOME.MODE 17: Absolute Mode - Calculate and save offset.
HOME.MODE 18: Find home input, then find next feedback zero position.
📜 Sample Code
- C#
Console.WriteLine("📜 Axis Homing: AKD Drive");
int exitCode = 0;
try
{
Helpers.VerifyHardwareUsage(controller);
Helpers.VerifyAxisCount(controller);
if (controller.NetworkStateGet() !=
RSINetworkState.RSINetworkStateOPERATIONAL)
{
Console.WriteLine("Network not started. Please start it before running this app.");
}
{
Console.WriteLine("Wrong Axis type. This sample requires an AKD Axis.");
}
System.Threading.Thread.Sleep(100);
Console.WriteLine("HOME.MOVE command sent");
UInt16 statusWord;
int isHomed = 0;
while (isHomed != 1)
{
isHomed = statusWord >> 12;
}
Console.WriteLine("Axis homed");
}
catch (Exception e)
{
Console.WriteLine($"❌ Error: {e.Message}");
}
finally
{
controller.Delete();
}
return exitCode;
Constants used in the C# sample apps.
const int EXIT_FAILURE
Exit code for failed execution.
const int AXIS_0_INDEX
Default: 0.
const int AMP_ENABLE_MS
Default: 750.
const int EXIT_SUCCESS
Exit code for successful execution.
void OriginPositionSet(double position)
Set the origin position.
void OperationModeSet(RSIOperationMode mode)
Set the axis operation mode.
NetworkNode * NetworkNode
Gets the associated NetworkNode object.
void ErrorLimitActionSet(RSIAction action)
Set the action that will occur when the Error Limit Event triggers.
Represents a single axis of motion control. This class provides an interface for commanding motion,...
static MotionController * Get()
Get an already running RMP EtherCAT controller.
Represents the RMP soft motion controller. This class provides an interface to general controller con...
char * AKDASCIICommand(const char *const command)
Send a Kollmorgen AKD ASCII command (NodeType must equal KOLLMORGEN_AKD).
uint16_t StatusWordGet(int32_t axisIndex)
Get the DS402 status word.
RSINodeType TypeGet()
Get the node type, as determined by the Vendor ID and Product Code.
void ClearFaults()
Clear all faults for an Axis or MultiAxis.
void Abort()
Abort an axis.
int32_t AmpEnableSet(bool enable, int32_t ampActiveTimeoutMilliseconds=AmpEnableTimeoutMillisecondsDefault, bool overrideRestrictedState=false)
Enable all amplifiers.
int32_t NumberGet()
Get the axis number.
RSINetworkState
State of network.
RSIAction
Action to perform on an Axis.
RSINodeType
Valid Node types.
RSIOperationMode
DS402 modes of operation.
Helpers namespace provides utility functions for common tasks in RMP applications.