|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
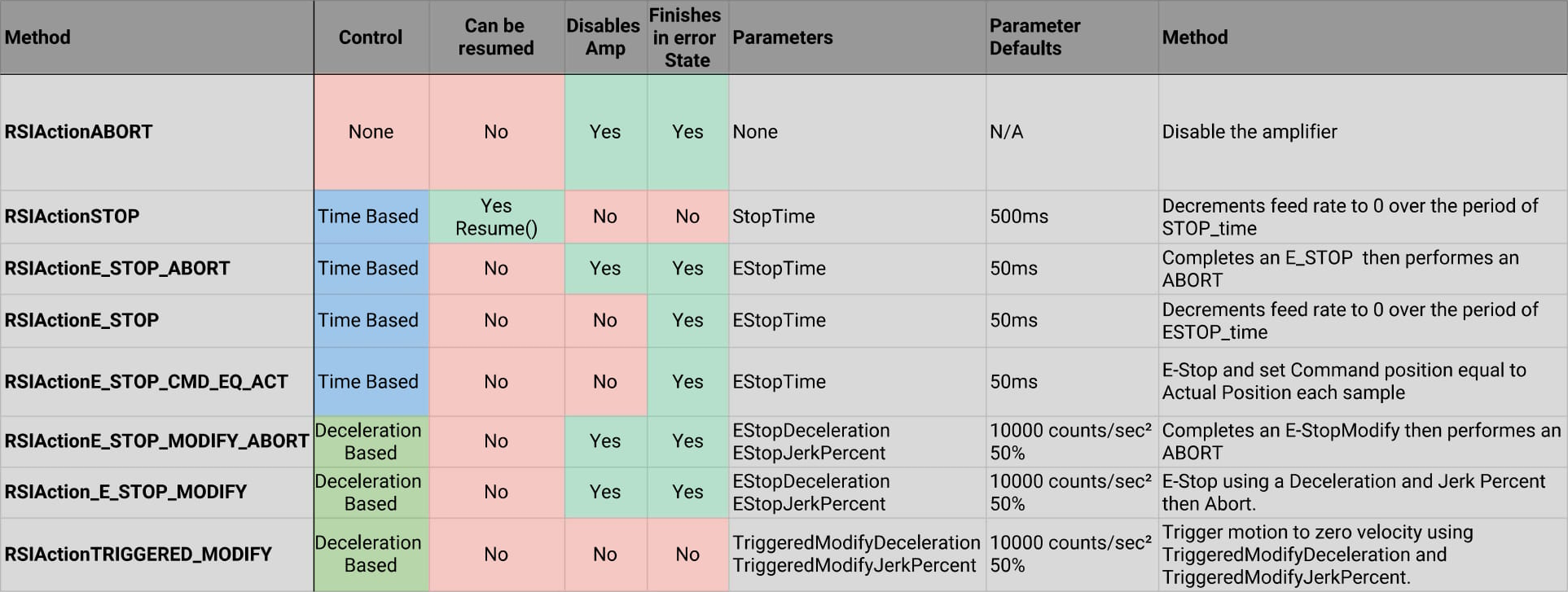
Define the rate at which motors or axes stop in response to STOP or ESTOP commands, with adjustable time frames and deceleration rates to suit application needs.
Stopping rates dictate how quickly your motor/axis stops spinning when a STOP or ESTOP command is issued.
When a STOP or ESTOP command is issued, the motion controller will slow the axis to stop in the given time frame. This time frame can be adjusted to fit the needs of your application. You can change the STOP and ESTOP time through RapidCode (shown in the sample application below) or under the “Settling Criteria” tab in RapidSetup (shown directly below).
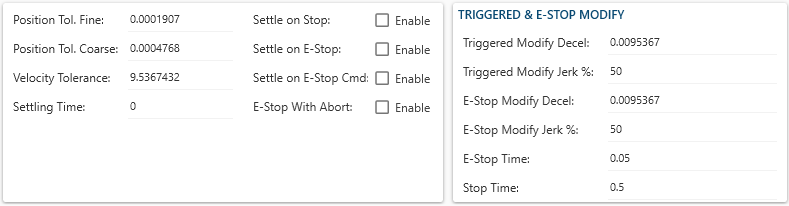
When a RSIAction "MODIFY" (RSIActionE_STOP_MODIFY_ABORT, RSIActionE_STOP_MODIFY, RSIActionTRIGGERED_MODIFY) the motion controller will slow the axis to a stop with a specified deceleration rate and percent jerk. You can change the EStopDecelerationSet(), TriggeredModifyDecelerationSet(), EStopJerkPercentSet(), and TriggeredModifyJerkPercentSet() through RapidCode.