RapidSetupX: Controller page.
- Create a new controller object.
- View the RMP's controller object status and information.
- Modify some MotionController object items.
- Note
- The Controller page is enabled only if connected to a RapidServer.
🔹 Sections
Learn about the different sections/cards available in this page.
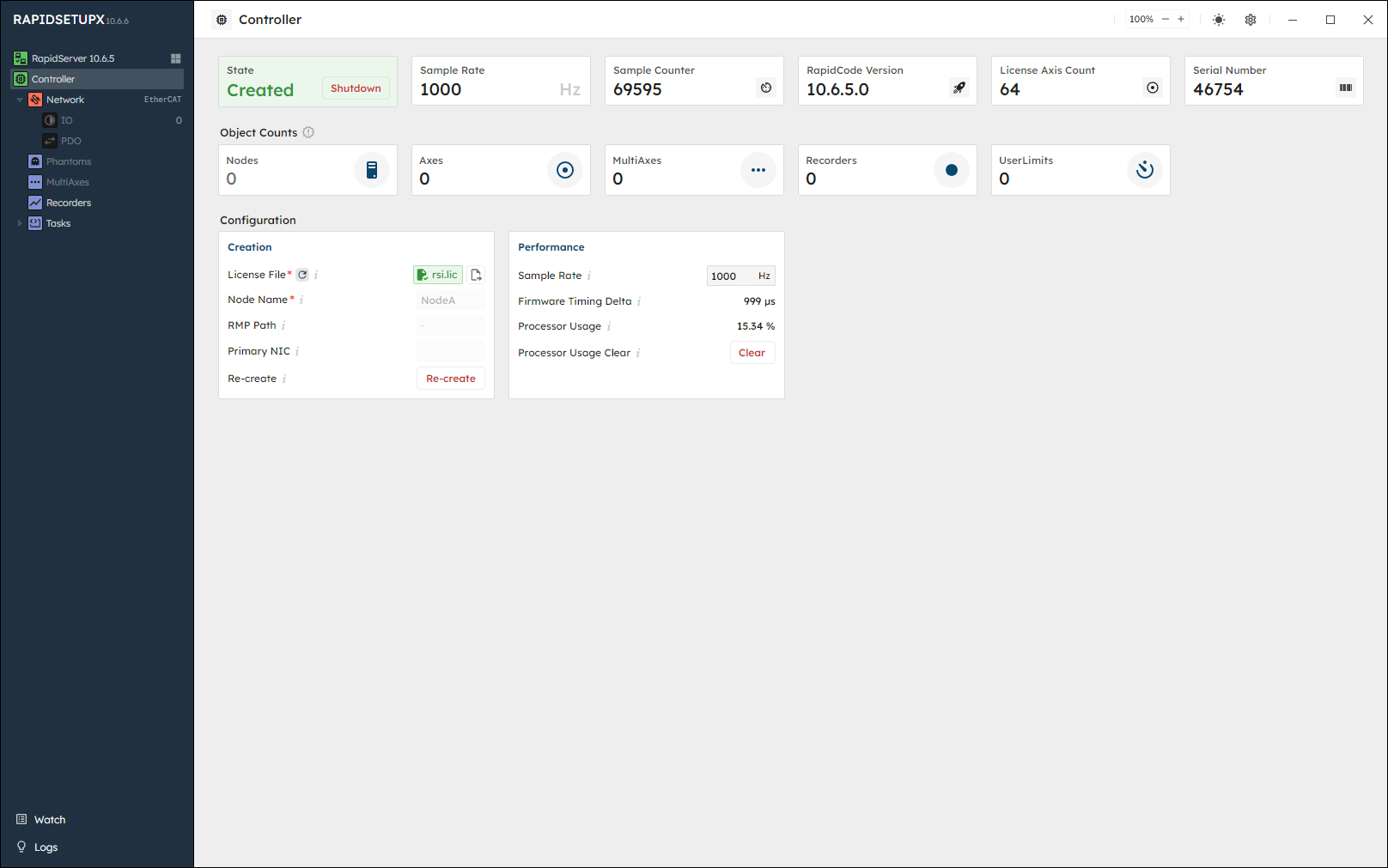
Overview

Some important information is shown at the top of the page:
- State: displays wether the controller is created or not. See Create.
- Sample Rate: displays the rate at which the controller computes data and sends/receives data via the EtherCAT network. See SampleRateSet and SampleRateGet.
- Sample Counter: displays the current sample count. See SampleCounterGet
- RapidCode Version: displays the version of the RapidCode-API that the rapidserver is using.
- Axis License Count: displays number of Axis objects supported by the controller. See AxisLicenseCountGet
- Serial Number: displays the RMP serial number. See SerialNumberGet
Configuration
| Windows rapidserver | Linux rapidserver |
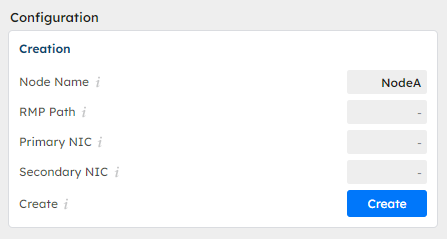 | 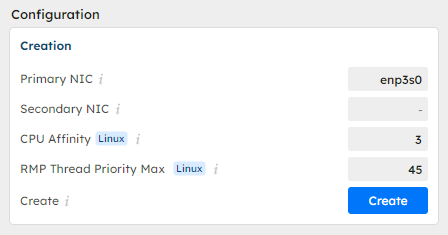 |
Set your parameters to create the controller. For the most part, the default parameters will work for most applications. Once you set your parameters, click the 'Create' button.
- Node Name windows-intime: this input field displays the name of the INtime node where you want to start the RMP.
- RMP Path: this input field displays the path to the RMP firmware (RMP.rta), license file, etc.
- Primary NIC: this input field displays the primary EtherCAT-network network-interface name.
- Secondary NIC: this input field displays the secondary EtherCAT-network network-interface name.
- CPU Affinity linux: this input field displays the CPU processor number used/pinned for RMP and RMPNetwork processes.
- RMP Thread Priority Max linux: this input field displays the relative thread priority. (RapidCode default is: 45)
- Create: this button allows you to create the controller with the previous specified parameters.
- Re-create: this button allows you to re-create the controller with the previously defined parameters.
Object Count

Here, you can view and modify the main object counts of your controller. Adjusting these counts allows you to enable different functionalities.
- Node Count: displays the total number of available EtherCAT devices/NetworkNode(s) present in the EtherCAT network.
- Axis Count: this input field the total number of physical and phantom Axis available. You can modify this count to add Phantom Axes.
- MultiAxis Count: this input field the total number of MultiAxis (Axes groups) in the controller.
- Recorder Count: this input field the total number of Recorder(s) in the controller. Add Recorders to enable Scope recording of the controller's memory items.
- UserLimit Count: this input field the total number of UserLimit(s) in the controller.
Performance
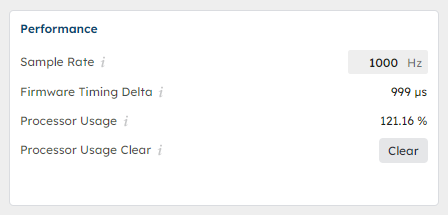
- Sample Rate: this input field allows you to see and modify the rate at which the controller data and sends/receives data via the EtherCAT network. See SampleRateGet and SampleRateSet (Change this before the network is started).
- Firmware Timing Delta: displays the most recent time (µs) between firmware samples. See FirmwareTimingDeltaGet.
- Processor Usage: displays the percentage of the firmware sample time used by the RMP controller. See ProcessorUsageGet.
- Processor Usage Clear: this button allows you to clear the Processor Usage value. See ProcessorUsageClear.