RapidSetupX: Axis page.
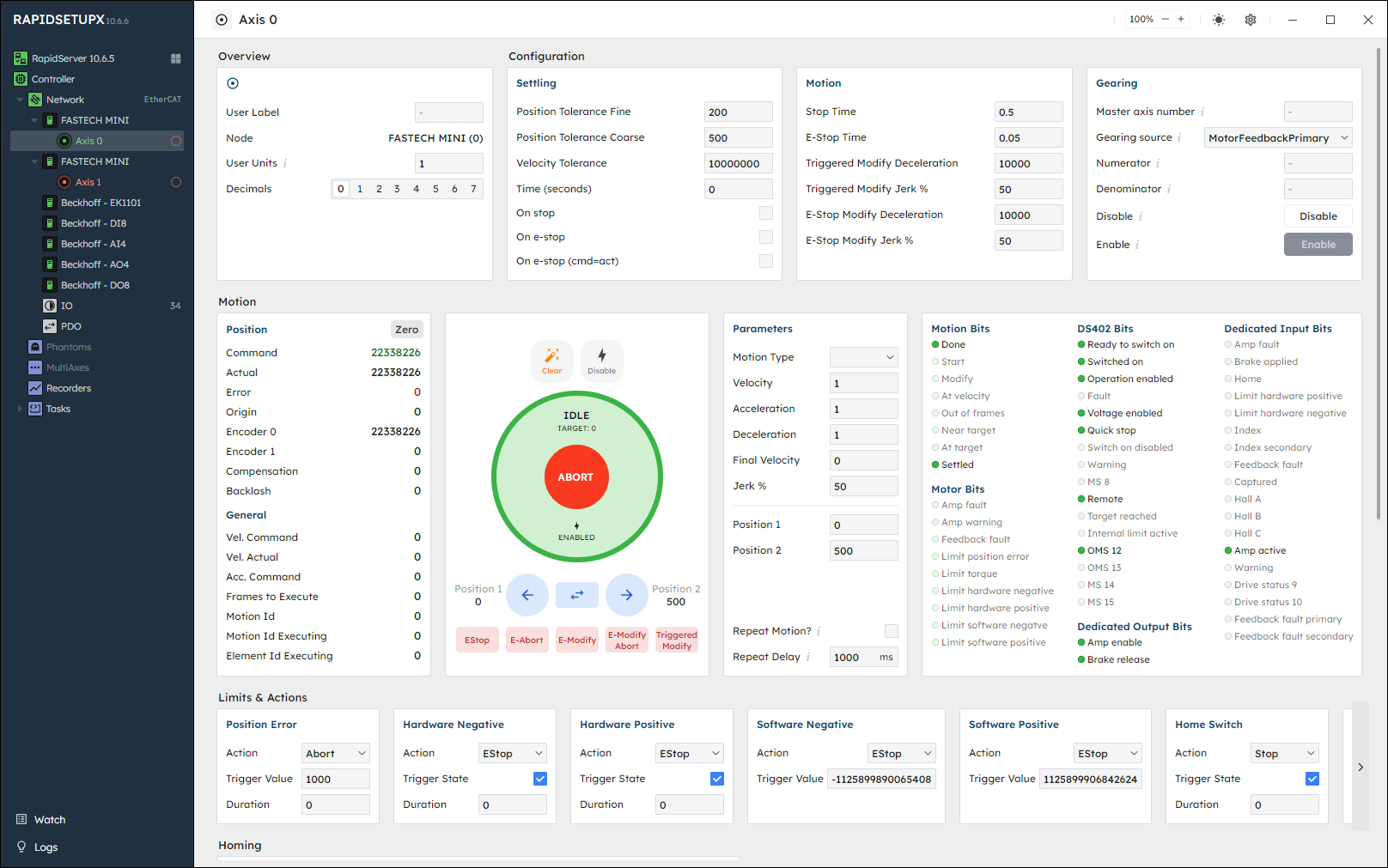
- Analyze Axis data.
- Command Axis motion.
- Configure your Axis.
🔹 Sections
Overview
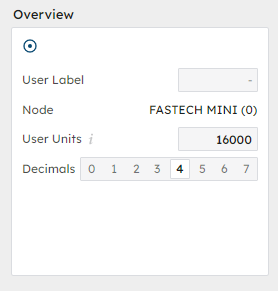
Some important information is shown at the top of the page:
- User Label: Create a name for your node. See UserLabelSet
- Node: Displays Node identification
- User Units: Convert raw encoder counts into meaningful units for practical application. See UserUnitsSet
- Decimals: Add up to 7 decimal places for precision
Configuration
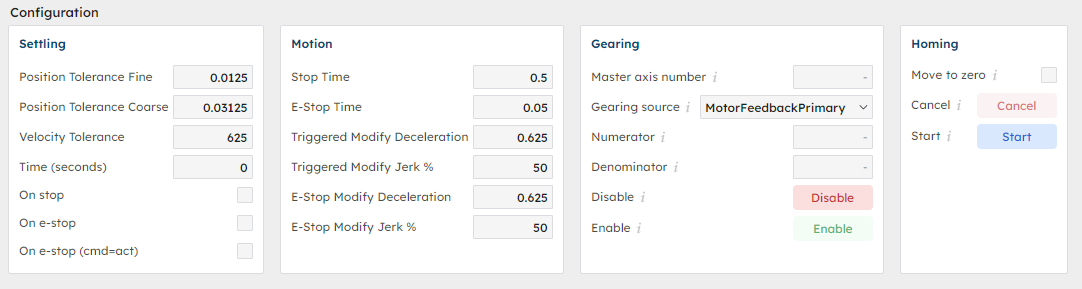
Configure Settling, Stop timing, Gearing, and Homing.
- Settling: Fine Position Tolerance allows you to define how close the motor needs to be to the commanded position. The Coarse Position Tolerance triggers an interrupt when the motor is near the target and must be set larger than the fine tolerance. For velocity moves, Velocity Tolerance dictates how closely the actual motor speed must match the commanded speed. Settling Time determines how long these metrics must remain within the set tolerances before triggering an interrupt. Enabling Settle on Stop/E-Stop keeps the motor in a STOPPING state until it reaches the fine position tolerance, while E-Stop With Abort adds an abort option to E-Stop actions on the axis. For more information, see Settling.
- Motion: Modify your stopping times and decelerations. Triggered Modify Decel adjusts the Decel rate during a Triggered Modify event, while Triggered Modify Jerk % changes the Jerk % for the same event. E-Stop Modify Decel and E-Stop Modify Jerk % allow you to modify the Decel rate and Jerk % during an E-Stop event. E-Stop Time and Stop Time allow you to set the deceleration time for E-Stop and Stop commands, respectively.
- Gearing: The master axis number represents the index of the master axis. The gearing source is defined by an RSIAxisMasterType value. The numerator and denominator specify how the slave axis follows the master, with the numerator being the multiple of counts and the denominator the divisor. You can disable or enable gearing as needed. For more information, see Gearing.
- Homing: Enable the homing procedure. "Move to Zero" refers to an index that represents the master axis. For more information, see Homing.
Motion
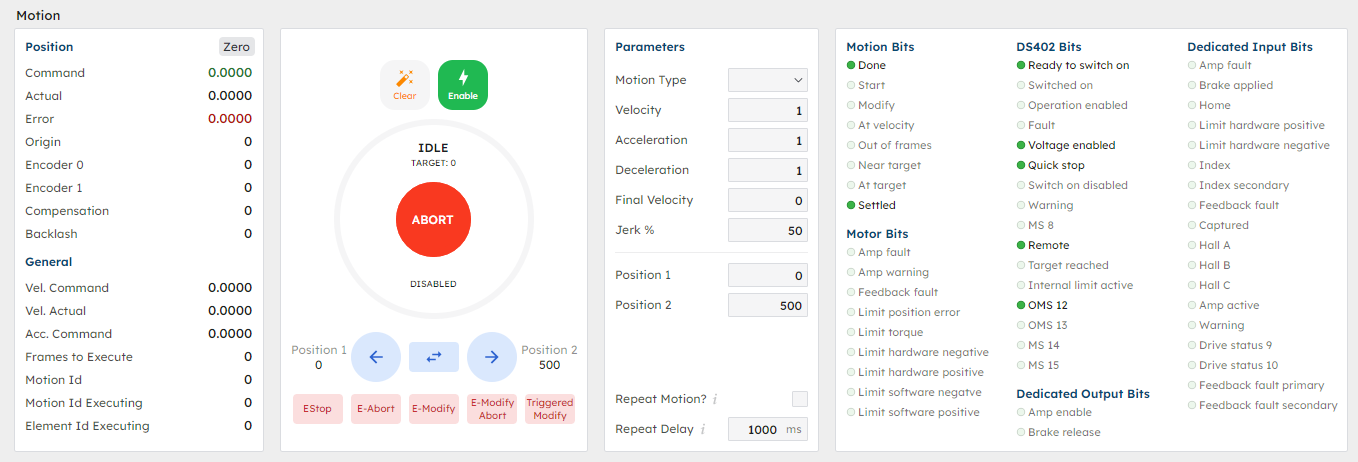
Configure motion parameters, monitor status bits, enable/disable motion.
- Position: Monitor live encoder feedback.
- Parameters: Select you motion type (Absolute, Relative, Velocity) and configure motion.
- Motion Bits: Monitor the status of your motion, drive, motor, and IO.
Limits & Actions

Here, you can configure error and limits, and their associated actions (none, stop EStop, abort, etc). Have a look at our Stopping Actions and Stopping Rates for more information. For configuration, see RSIAction. Take a look at Status for our RapidCode API status calls.
| Error Type | Description |
| Position Error | A Position Error occurs when the difference between the actual position and commanded becomes greater than the Trigger Value. When a position error occurs, the selected Action is executed after the Duration in ms. |
| Pos/Neg (+/-) Hardware | Pos/Neg (+/-) Hardware Limits occur when the logic state of the (+ or -) hardware limit becomes active. The Trigger State allows you to set the input as active high or low. When a (+ or -) hardware error occurs, the selected Action is executed after the Duration in ms. |
| Pos/Neg (+/-) Software | Pos/Neg (+/-) Software occurs when the logic state of the (+ or -) software limit becomes active. The Trigger State allows you to set the input as active high or low. When a (+ or -) software error occurs, the selected Action is executed after the Duration in ms. See SoftwareNegLimitActionGet and more |
| Home Switch | Home Switch occurs when the capture state during a homing routine triggers. When the home capture occurs, the selected Action is executed after the Duration in ms. See Home for more information |
| Amp Fault | Amp Fault occurs when the Drive/amplifier has a Fault. The Trigger State should almost always be checked. When an amp fault occurs, the selected Action is executed after the Duration in ms. See AmpFaultActionGet for more information. |