|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
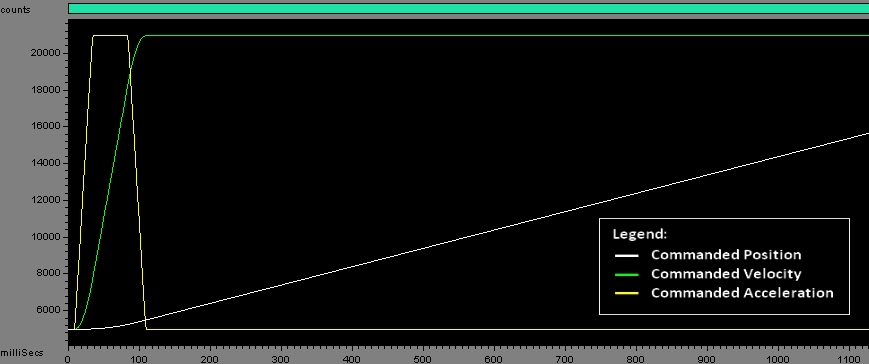
| void MoveVelocity | ( | double | velocity, |
| double | accel ) |
| velocity | Target velocity, units/second. |
| accel | Maximum acceleration, units/second/second. |
Part of the Motion method group.