|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
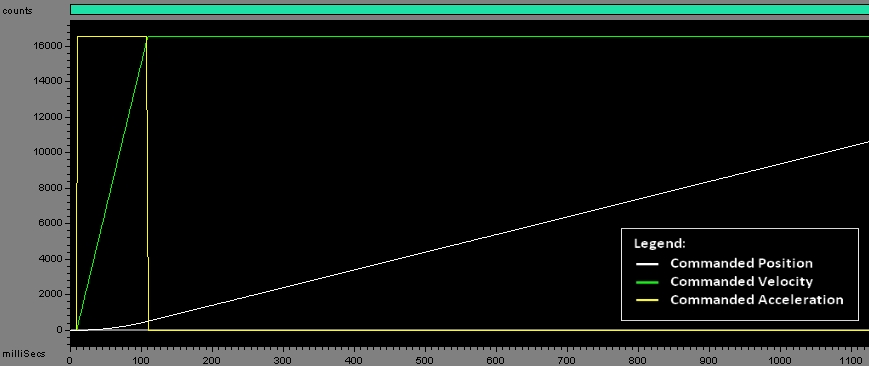
| void MoveVelocitySCurve | ( | double | velocity, |
| double | accel, | ||
| double | jerkPct ) |
| velocity | Target velocity, UserUnits/second. |
| accel | Average acceleration, UserUnits/second/second. (peak up to 2× accel when jerkPercent = 100, see below) |
| jerkPct | Which defines the percentage of acceleration time which is smoothed, 0.0 to 100.0. |
Using a non-zero JerkPercent increases the maximum acceleration above the user-specified average. If your system can’t handle the higher peak, you risk overshoot or excessive load. The relation between average acceleration and maximum acceleration is:
\[ Maximum Acceleration \;=\; \frac{accel}{1 - \bigl(jerkPercent \times 0.005\bigr)} \]
See the S-Curve Motion concept page for more information.
Part of the Motion method group.