|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
Utilize general-purpose IO for versatile digital and analog input/output control across the EtherCAT network.
In the RapidCode API, when we use the term IO, we mean general-purpose digital inputs or digital outputs and analog inputs or analog outputs.
General-purpose IOs are typically connected to the EtherCAT network via slave module. Click to see the hardware list.
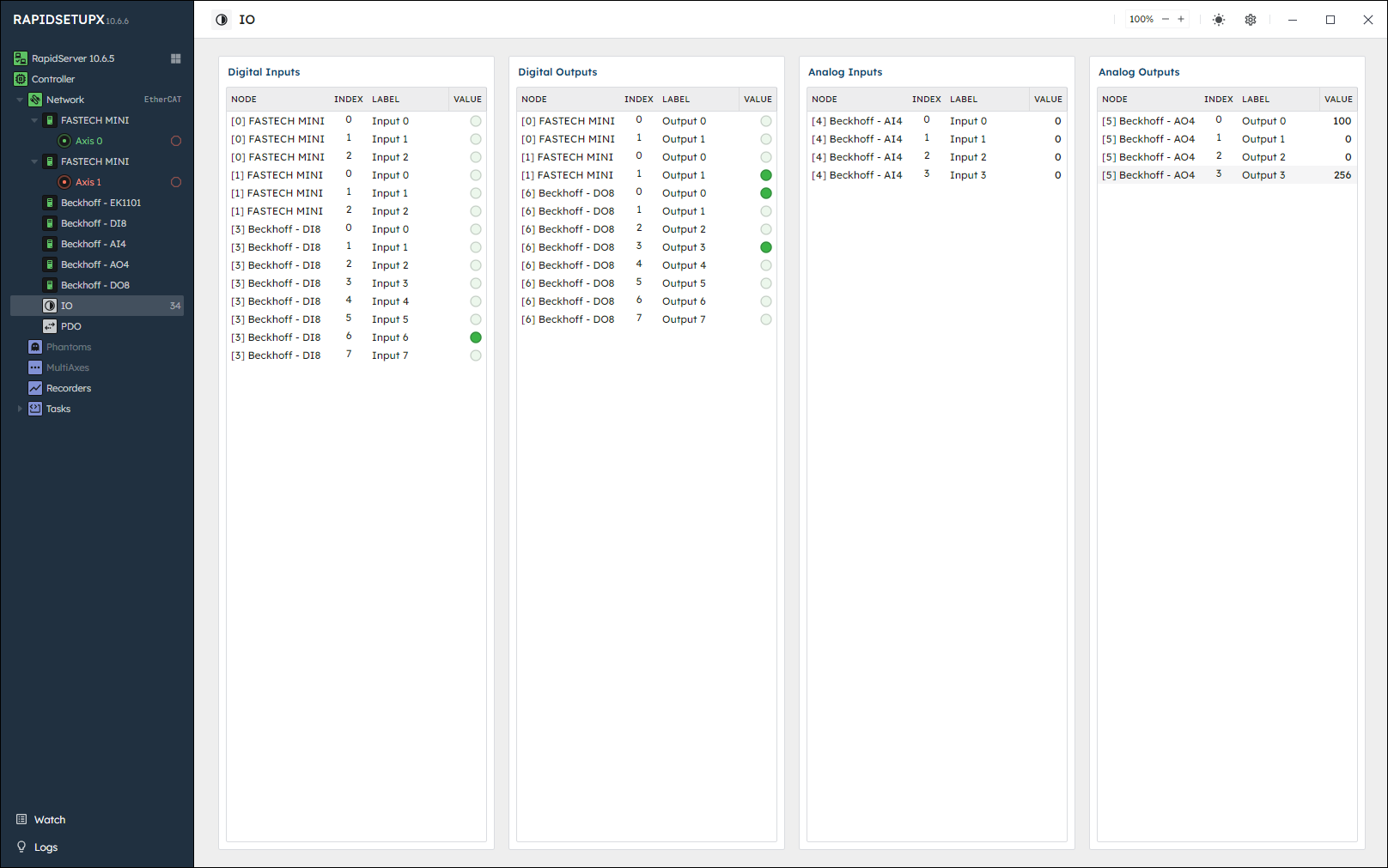
Here is a picture of RapidSetupX showing all available general purpose IO in the system's network:
There are two ways to access general purpose digital/analog inputs/outputs:
| Method | Returns | Description |
|---|---|---|
| DigitalInGet | bool | Reads the state of a digital input |
| DigitalOutGet | bool | Reads the current state of a digital output |
| DigitalOutSet | void | Sets the state of a digital output |
| AnalogInGet | int32_t | Reads the value of an analog input channel |
| AnalogOutSet | void | Sets the value of an analog output channel |