|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
Guide on how to spin an axis/motor with RapidSetupX.
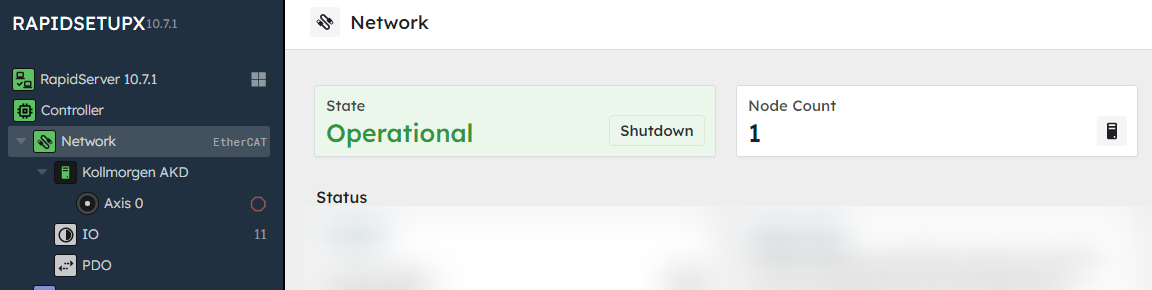
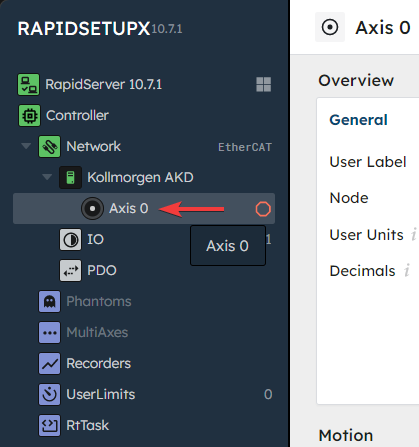
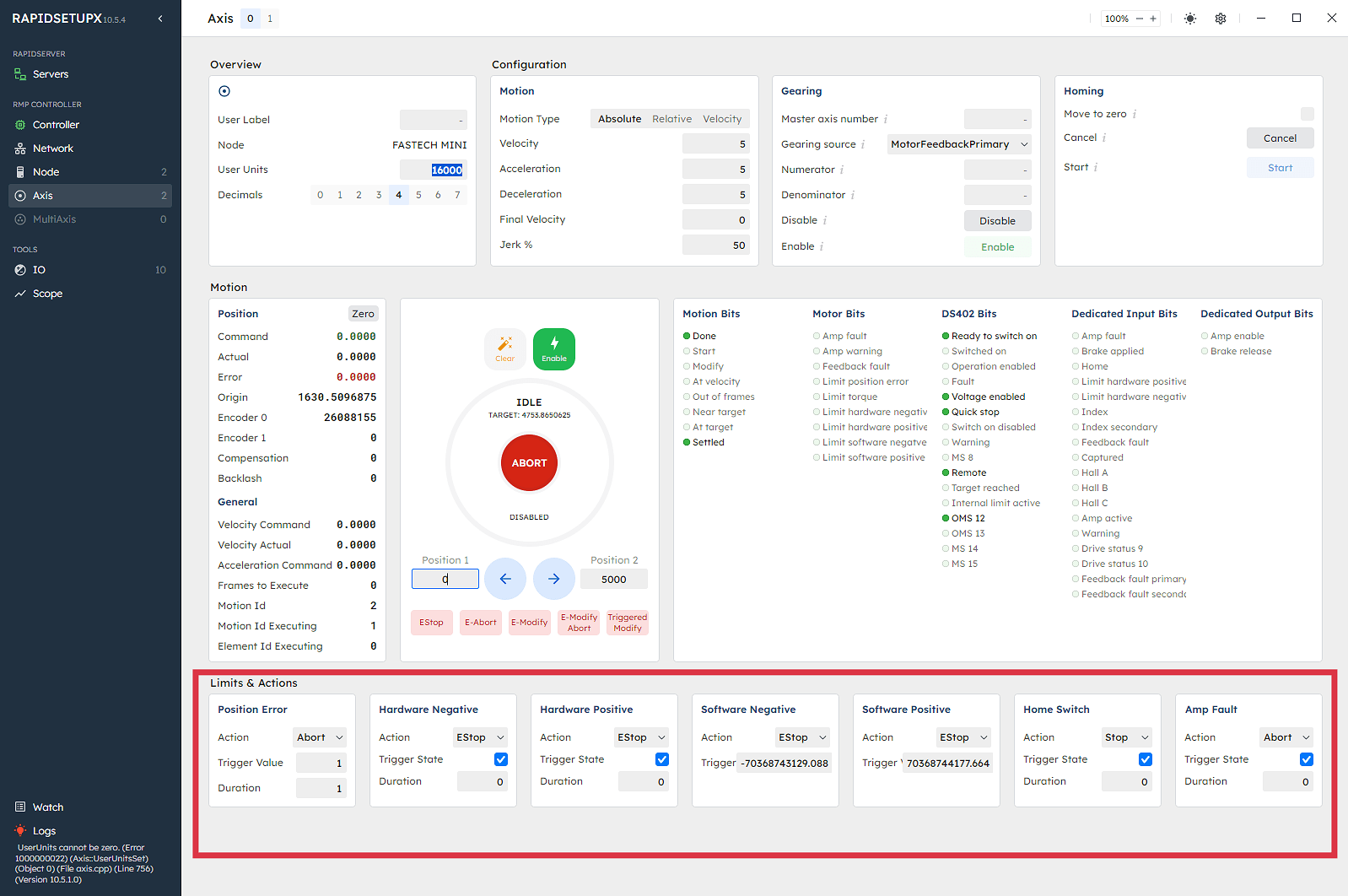
Navigate to the "Axis" page
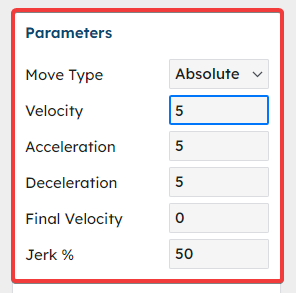
Here you will enter in a few values
Input Velocity, Acceleration, and Deceleration
It is recommended to start with low values. You can also change the motion type from Absolute to Relative or Velocity.
Zero Out Position
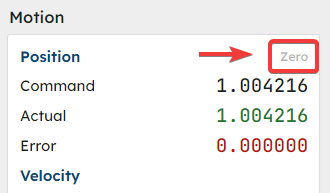
Enter desired ending position
This value is based off User Units, so it will be the number of full revolutions your axis makes
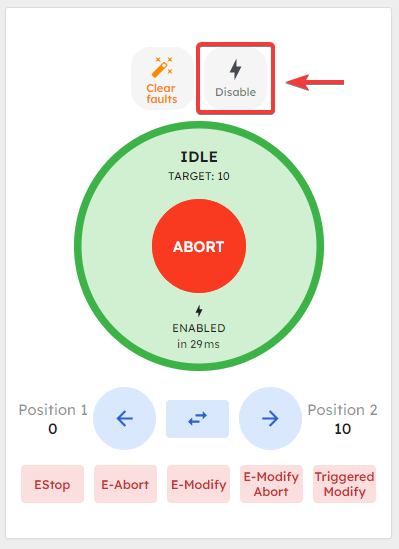
Enable the Amplifier
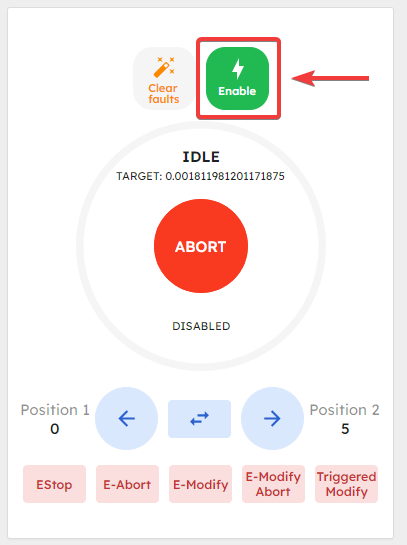
RapidSetupX is now ready to move your motor
Move Forward
Make sure your motor is in a safe and secure location. When adjusting parameters, motors can sometimes have unexpected behavior. The motor will stop once it has reached the designated position.

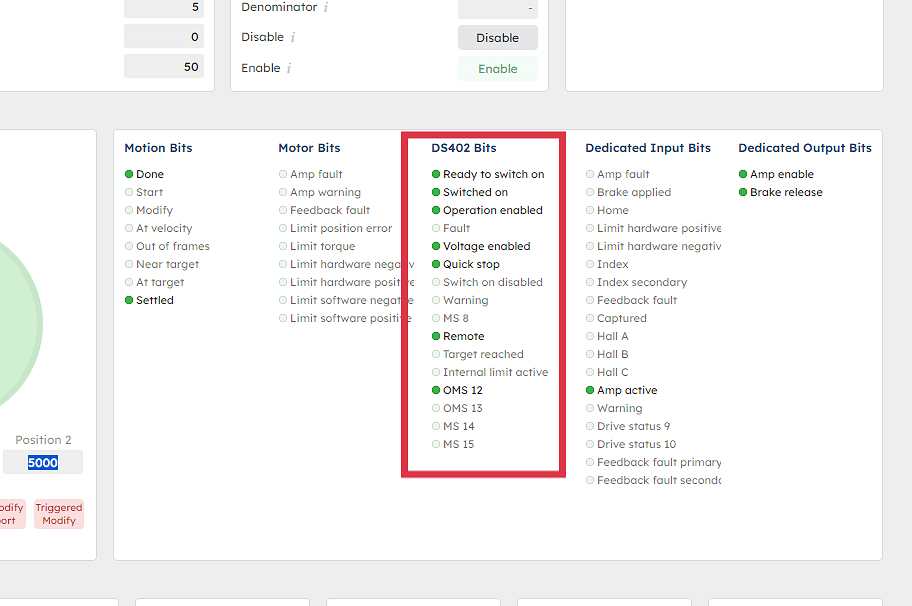
🛑 If you encounter the error -> LimitError: Position Error Limit
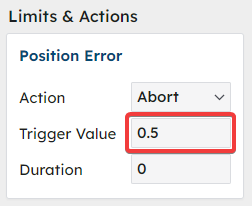
Check Limits and Action
Adjusting limits and actions can have unintended consequences. Kindly implement essential safety measures to safeguard both yourself and those around you. Feel free to reach out to us for tailored guidance on enhancing the security of your system.
✅ You have now moved an axis with RapidSetupX