|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
Convert raw encoder counts into meaningful units like inches, centimeters, or degrees for practical application in motion control systems.
User Units are a way to format the values you work with into something more meaningful than raw counts. They are often used to change counts to distance (cm, inch, etc), degree, full rotation, etc.
.png)
Many people like to use linear units such as inches or centimeters. In this case you need to calculate how many motor revolutions there are in a centimeter then multiply that number by the motor resolution. See examples below.
Click the Zero button to reset position values (this will not move the motor).
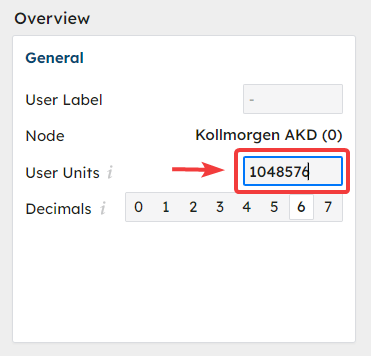
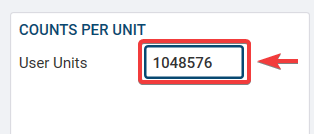
Enter that number in the User Units field
Click the Zero button to reset position values (this will not move the motor).
Enter that number in the User Units field.
\[\mathrm{Revs}_{\mathrm{Mtr}}/{\mathrm{Degree}} = \left( \frac{1\,\mathrm{Rev}_{\mathrm{Mtr}}}{360\,\mathrm{Degrees}} \right) = 0.002777\,\mathrm{Rev}_{\mathrm{Mtr}}/{\mathrm{Degree}} \]
If you have an AKD drive, a motor hooked up to a 5mm/rev ball screw, with a 2:1 timing belt and you want to work in Inches.
Helpful hints: There are 25.4mm in 1 Inch. The actuator travels 5mm in 1 ball screw revolution. The motor needs to turn 2 revs to turn the ball screw 1 rev.
\[{\mathrm{Revs}_{\mathrm{Mtr}}}/{\mathrm{Inch}} = \left( \frac{2 \,\mathrm{Rev}_{\mathrm{Mtr}}}{1\,\mathrm{Rev}_{\mathrm{Ballscrew}}} \right) \left( \frac{1 \,\mathrm{Rev}_{\mathrm{Ballscrew}}}{5\,\mathrm{mm}} \right) \left( \frac{25.4\,\mathrm{mm}}{1\,\mathrm{in}} \right) = 10.16\,\mathrm{Rev}_{\mathrm{Mtr}}/{\mathrm{Inch}} \]
Resolution = 2^20 = 1048576 Counts/MtrRev (set by AKD drive)
Counts per Unit = 1048576 Counts/MtrRev x 10.16 MtrRevs/Inch = 10653532.16 Counts/Inch
If you have an S300 drive with PRBASE set to 16, a motor hooked up to a conveyor belt that has a 5-in-diameter roller, a 25:1 gearhead and you want to work in meters.
Helpful hints: There are 0.0254 meters in 1 Inch. The linear distance that the belt travels in one roller revolution is the same as the roller circumference. The motor needs to turn 25 revs to turn the roller 1 rev.
Roller Circumference = 5in x pi = 15.707 inches
\[\mathrm{Revs}_{\mathrm{Mtr}}/{\mathrm{meter}} = \left( \frac{25\,\mathrm{Rev}_{\mathrm{Mtr}}}{1\,\mathrm{Rev}_{\mathrm{Roller}}} \right) \left( \frac{1\,\mathrm{Rev}_{\mathrm{Roller}}}{15.707\,\mathrm{in}} \right) \left( \frac{1\,\mathrm{in}}{0.0254\,\mathrm{m}} \right) = 62.663\,\mathrm{Rev}_{\mathrm{Mtr}}/{\mathrm{meter}} \]
Resolution = 2^16 = 65536 Counts/MtrRev (set by PRBASE in S300 drive)
Counts per Unit = 65536 Counts/MtrRev x 62.663 MtrRevs/meter = 4106700 Counts/meter
If you have an AKD drive, a free-spinning motor that is not connected to anything, and you want to work in Revolutions.
Helpful hints: The AKD drive uses 1048576 Counts/MtrRev regardless of the motor feedback device.
Resolution = 2^20 = 1048576 Counts/MtrRev (set by AKD drive)
Counts per Unit = 1048576 Counts/MtrRev
If the drive resolution is 24 bits and you want to work in Revolutions.
Resolution = 2^24 = 16777216 Counts/MtrRev (set by drive)
Counts per Unit = 16777216 Counts/MtrRev