|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
Leverage RapidWorkbench for precise, network latency-free homing of Kollmorgen AKD drives, configuring homing parameters directly via the EtherCAT connection.
RapidWorkbench)
Kollmorgen AKD drive based homing uses preloaded homing modes available on AKD drive. This allows for homing to be performed entirely in the AKD drive without network latencies that produces more accurate results. AKD drive based homing is the recommended homing strategy for Kollmorgen AKD drives.
RapidWorkbench is a utility that emulates Kollmorgen's Workbench tool, which allows a user to alter the parameters of AKD servo drive.
One advantage of RapidWorkbench is the ability to connect to the AKD drive using standard EtherCAT connection instead of service port (X11). Once the drive is detected in RapidWorkbench, a user can configure drive settings such as maximum motor current, encoder resolution, I/O scaling, and etc.
1.1 - Open RapidSetup Node Page
.png)
1.2 - Change the operation mode by writing a value of 6 to the SDO 0x6060 with byte count 1.
.png)
1.3 - Verify the correct value was written to it by reading the SDO 0x6060 with byte count 1.
.png)
2.1 - Run RapidSetup. Then go to Tools > RapidWorkbench for AKD.
.png)
2.2 - RapidWorkbench will open.
.png)
2.3 - Now, if you are connected to any axes through your AKD drive. Select an Axis. (Note: make sure the RapidSetup network is OPERATIONAL)
.png)
3.1 - Click on Home.
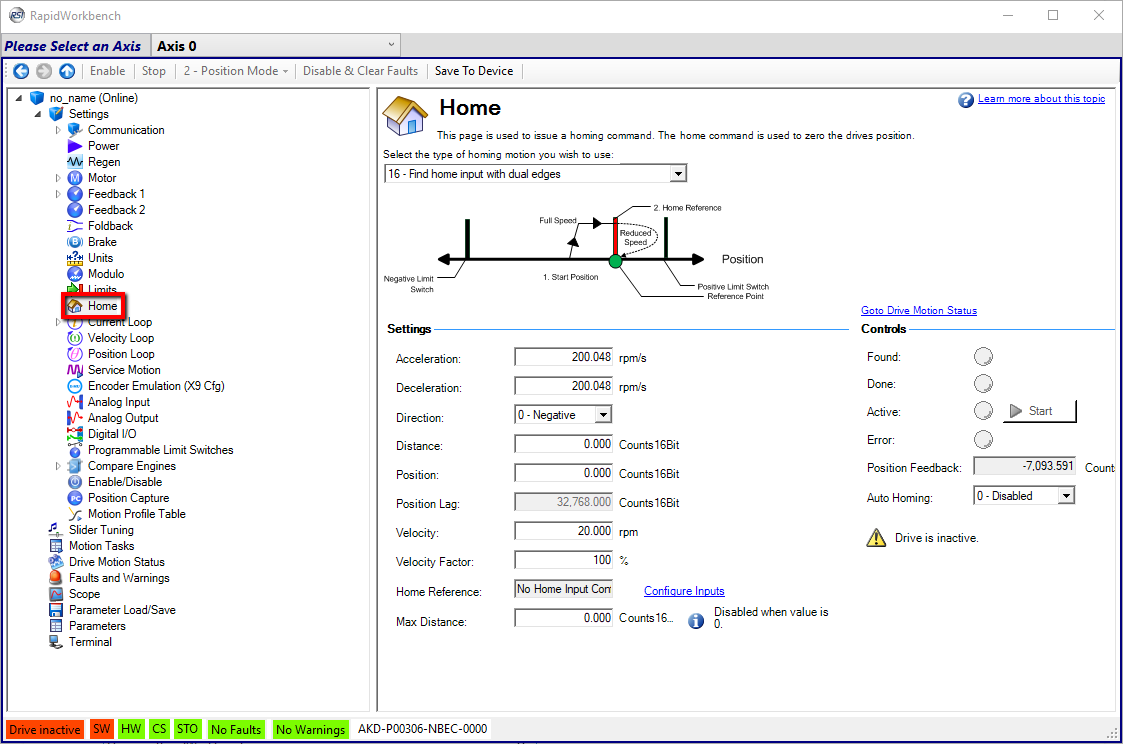
3.2 - Select Homing Method and adjust Settings.
.png)
3.2 - Start Homing by clicking on the Start button.