|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
A desktop tool that emulates Kollmorgen's Workbench tool for working with AKD servo drives via an EtherCAT network.
RapidWorkbench is a utility that emulates Kollmorgen's Workbench tool, which allows a user to alter the parameters of the AKD servo drive.
One advantage of RapidWorkbench is the ability to connect to the AKD drive using a standard EtherCAT connection instead of a service port (X11). Once the drive is detected in RapidWorkbench, a user can configure drive settings such as maximum motor current, encoder resolution, I/O scaling, etc.
1.1 - Navigate to your RMP folder. (Ex: C:\RSI\10.3.6 your version might be different)
1.2 - Locate the RapidWorkbench.zip file and click "Extract all".
.png)
2.1 - Run RapidSetup. Then go to Tools > RapidWorkbench for AKD.
.png)
2.2 - You will be seeing an error like this:
.png)
2.3 - Click OK.
2.4 - File Explorer should opened in the RapidWorkbench.zip.
.png)
2.5 - Click Extract All.
.png)
2.6 - A window similar to the below one should open.
.png)
Delete “RapidWorkbench” from the path above, then click Extract. (Note: your RMP version might not be 7.2.6, go to your version folder)
.png)
2.7 - Wait for files to transfer 100%.
.png)
2.8 - Open RapidWorkbench again. Go to Tools > RapidWorkbench for AKD.
.png)
2.9 - Some pop-ups may appear. Allow the app to make changes to your device/computer.
2.10 - RapidWorkbench will open.
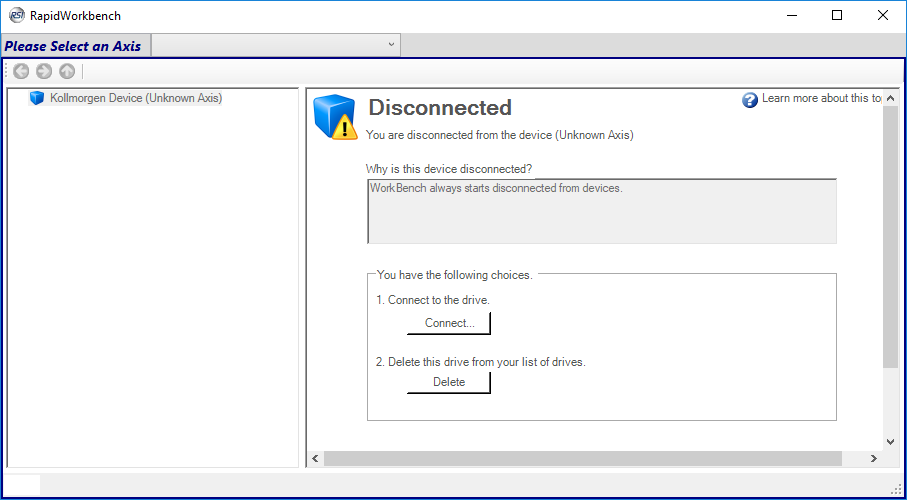
2.11 - Now, if you are connected to any axes through your AKD drive. Select an Axis. (Note: make sure the RapidSetup network is OPERATIONAL)
.png)