Configure motor type, operation mode, backlash, and encoder ratio of an axis.
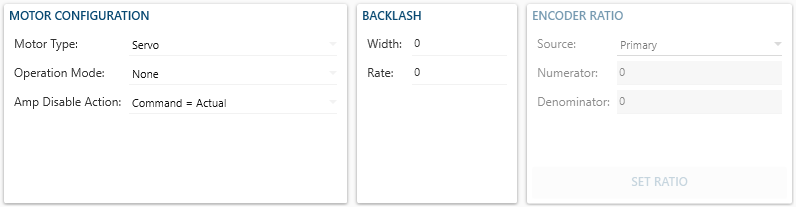
🔹 Motor Configuration
These parameters define the type of motor and how it is going to run.
- Motor Type defines the type of motor. (Available options are: Servo, Phantom (virtual), Stepper)
- Operation Mode allows you to specify what mode your drive is running in. (This will only work if the drive mode of operation is specified in the EtherCATNodeInfo.xml file)
- Amp Disable Action executes when Drive/amplifier is disabled. Should almost always be set to "Command = Actual". This prevents position error from building up when the drive is disabled.
🔹 Backlash
Configuration for position compensation when axes have significant backlash between the feedback device and the mechanical systems.
- Width is used to set the total number of counts (centered at 0) that is added/subtracted by the compensator.
- Rate is the rate in counts/second at which the backlash compensator adds/subtracts counts.
🔹 Encoder Ratio
Scales the selected encoder by the Numerator/Denominator ratio.
- Source select whether you would like your source to be a primary or secondary.
- Numerator & Denominator used to calculate the ratio that will be set on your encoder.
Note: default is set to 0/0 which disables the feature. Setting the ratio 1/1 consumes more resources than if it were disabled