|
|
APIs, concepts, guides, and more
|
|
|
APIs, concepts, guides, and more
|
Stream arrays for precise control over Positions, Velocities, Acceleration, Jerk, and Time deltas directly to the frame buffer. Achieve absolute control over the motion path.
PVAJT motion is a lot more complicated to use because it requires an array of Positions, Velocities, Acceleration, Jerk, and Time deltas. The controller is not responsible for any calculations because it streams the arrays straight to the frame buffer. This makes it very flexible and gives users absolute control over the motion path. The controller does not do any interpolation or calculations because everything it needs is calculated beforehand in the PVAJT arrays. PVAJT motion must all be provided in advance and cannot be appended to.
The effect of velocity, acceleration, and jerk depends on the time between points. Larger time deltas increase the influence of the higher-order terms, while at the opposite extreme (using 1-sample time deltas) the motion is equivalent to PT.
| Move PVAJT | Output Example |
|---|---|
|
PVAJT is useful if you must control the acceleration and jerk percent profile throughout motion. The example to the right shows a 50% jerk SCurve trapezoidal move. This move requires 7 elements in each array. One segment for each rising/constant/falling segment of the acceleration profile. The math for PVAJT can be very cumbersome. We recommend you explore all other motion types before trying to implement this method. Note: The Position, Velocity, Acceleration, and Jerk arrays are all direction sensitive meaning you must put a (-) sign on negative numbers. | 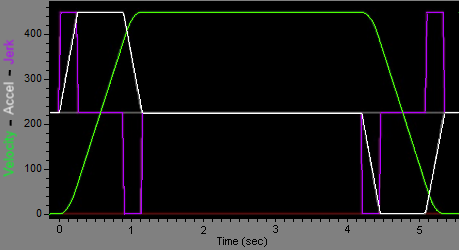 |